































総合優勝者:オランダのワーヘニンゲン大学のブルズアイチーム。 先見の明のあるコンセプトを持つフリースタイルタスク。 フィールドシミュレーションは、大きな学習効果を伴う課題を証明します。 500日間でXNUMX人以上の海外の視聴者がオンライン
(DLG)DLG Feldtageと提携し、今年初めてDLGのデジタルプラットフォームで仮想形式で開催された、留学生チーム向けのフィールドロボットコンテストである第18回国際フィールドロボットイベントは、主催者であるホーエンハイム大学とヴァーヘニンゲン大学から贈られた受賞者。 2021年のイベントの総合優勝者は、オランダのワーヘニンゲン大学のブルズアイチームで、湾曲したトウモロコシの列、植物の欠落の有無にかかわらず直線の列、雑草、ごみの認識など、XNUMXつのフィールドタスクでのパフォーマンスが評価されました。その後、岬に移動します。 フリースタイルイベントは、学生チームが自分で選んだ農業課題を解決するための工学的能力を披露できるオプションのイベントで、カボチャを検出して摘み取ることができる収穫ロボットを備えたミュンスター応用科学大学のセレスチームが優勝しました。 。
518人の海外からの視聴者が参加
このイベントには、技術および学術の専門家、エンジニア、大学のスタッフ、学生だけでなく、さまざまな国の農家からなる、世界中から518人の視聴者が集まりました。 プロダクトマネージャーなどの業界の参加者も、国際的なジャーナリストが取り上げたライブイベントに参加し、NASAが宇宙探査に使用したのと同様のフォトリアリスティックなシミュレーション環境でロボットが動作するのを観察しました。 視聴者は、ライブチャットを通じて、デンマーク、ドイツ、オランダ、ルーマニア、スロベニアの14の国際チームや、専門家やその他の視聴者と交流する機会がありました。
仮想トウモロコシ畑の開発に対するコラボレーション賞
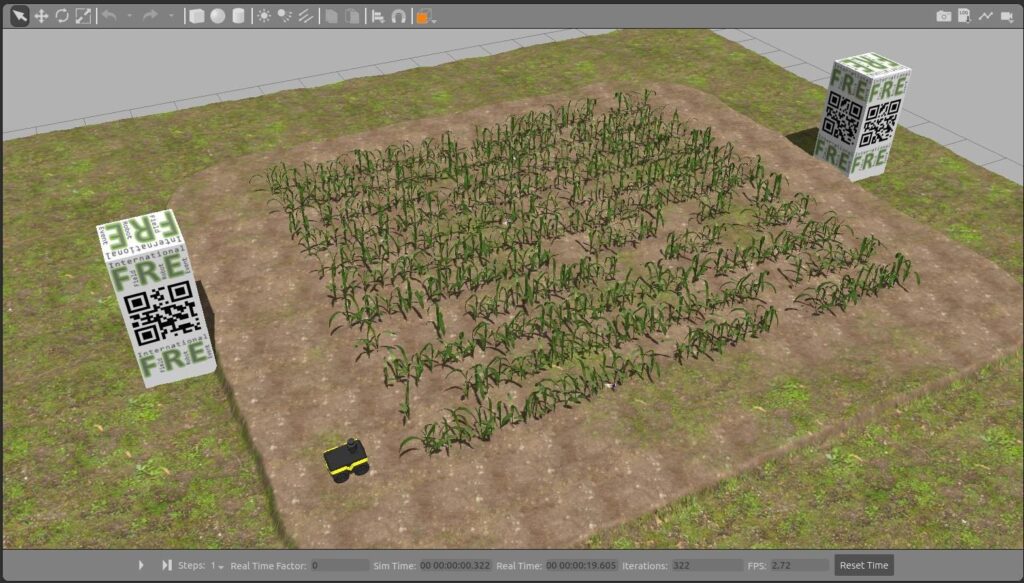
名誉コラボレーション賞は、カールスルーエ工科大学(KIT)の革新的なフィールドロボットの学生エンジニアリングチームであるカマロエンジニアリングに授与されました。 コラボレーション賞は、シミュレートされた環境での仮想トウモロコシ畑の開発への貢献を表彰するものです。 この作業には、トウモロコシの植物やその他のコンポーネントがどのように見えるかを正確に記述するコードを記述し、風や影などの実際の効果を作成して、さまざまな農業分野のシナリオ、特に雑草の認識や障害物の検出を実行することが含まれていました。
学齢期の才能のXNUMXつのチーム
今年は、CarboniteとCamper RoboticのXNUMXつのチームが、それぞれドイツの都市ハンブルクとユーバーリンゲンの技術的な才能を持つ学齢期の子供たちで構成されました。 Camper Roboticチームは、FieldBalancerと呼ばれる独自の「セグウェイ」タイプのロボットを開発しました。 Carboniteチームはいくつかのタスクで優れており、全体でXNUMX番目になりました。
「このバーチャルイベントは初演でした。結果と学生からのフィードバックに非常に満足しています。 シミュレートされた環境は、フィールドロボットの開発作業の大部分を占めています。 シミュレートされた環境でライブで行われるこのイベントは、システムの機能を確立するだけでなく、他のチームとのベンチマークを行うための非常に困難な演習であると思います。 これは、今後何ヶ月にもわたって大きな学習効果をもたらすでしょう」と、ドイツのホーエンハイム大学の作物生産技術部門のディレクターであるハンスW.グリーペントロッグ教授は述べています。
「このイベントのために特別に作成したROSGazeboシミュレーション環境は、学生チームにとって有用でした。そのため、学生がそのプラットフォームで将来のフィールドロボットシミュレーションをテストできるように、コンテスト後も利用できるようにすることにしました。 」とGriepentrog教授は結論付けました。
フリースタイルイベント–将来のコンセプト
イベント内のフリースタイルタスクは常に観客のハイライトであり、チーム自身によって選択および開発されたフィールドアプリケーションの先見性のあるコンセプトを備えた未来への窓を提供します。 コンテストのオプションのカテゴリであるこのタスクは、学生チームに、選択した実用的なフィールドタスクのソリューションを開発するスキルを示す機会を提供しました。 今年のイベントでは、フリースタイルのタスクがビデオとして学生によって提示されました。 フリースタイルのタスクには、セレスからの収穫ロボットが含まれ、フリースタイルのカテゴリを獲得しました。 XNUMX番目に来るのは、マリボル大学のFarmBeastチームによって開発された、雑草を認識し、必要な場合にのみターゲットスプレーを行うことができるスプレー器具で、土壌保護に貢献しました。 XNUMX位は、ベテルギウスフィールドロボットを備えたカマロチームで、トレーラーベースの道具を含む複数のアタッチメントを備えたモジュール式の自己構成型フィールドロボットとしての地位を示しました。
国際フィールドロボットイベントは、さまざまなフィールドタスクを網羅する国際フィールドロボットコンテストです。 湾曲した作物の列の間でロボットをナビゲートし、雑草や単にゴミであるオブジェクトを認識し、地理参照を使用してオブジェクトをマッピングすることは、センサーとアルゴリズムを使用してフィールドロボットによって解決される課題の一部です。 カメラを使って何が雑草であるかを判断するなど、情報をリアルタイムで解釈することは複雑であり、何ヶ月もの事前の開発作業が必要です。 ツールを操作するアクチュエータの正確なソフトウェア制御が必要な場合は、雑草やゴミを取り除く必要がありました。 課題は、その日のデータをインテリジェントに理解することです。これには、ロボットが与えられた情報を解釈し、最適な決定を行うことが含まれます。 複雑さ、パフォーマンス、農業の有用性が重要な判断基準でした。
利用可能なコンテストのビデオ
シミュレートされたすべてのフィールドタスク、審査員による解説、およびフリースタイルタスクのためにチームによって提出されたビデオを含む、XNUMX日間のフィールドロボットイベントのオンデマンドビデオは、各イベント日の個別のリンクとしてDLGのオンラインプラットフォームで利用できます。
8月XNUMX日:湾曲した列のあるトウモロコシ畑でのナビゲーション。 植物が欠けているまっすぐな列。 リンク
9月XNUMX日:雑草と物体の検出と地理参照。 岬への移動。 リンク
10月XNUMX日:フリースタイルイベント。 リンク
XNUMXつのカテゴリーのそれぞれの勝者とそのスコアの完全な詳細はで入手できます。 https://www.fieldrobot.com/event/
国際フィールドロボットイベントは、大規模なデジタル農業イベントの本拠地でもあるDLGのデジタルプラットフォームで開催されました。 このプラットフォームは、製品コンテンツと個人、グループ、またはパブリックインタラクションの両方をユーザーに提供する接続プラットフォームです。
2003年以降の実用的なフィールドロボット研究
2003年にオランダのヴァーヘニンゲン大学によって開始されたフィールドロボットコンテストは、先駆的なロボット工学と精密農業技術を実世界の条件下でテストし、若い科学者に仲間と意見を交換して発展させる機会を提供します。 フィールドイベントのように、バーチャルイベントの競技者はお互いにそして国際的な視聴者と交流する機会がありました。 この相互作用はイベントの重要な部分であり、彼らが彼らの概念を前進させるのを助けました。
2021年からDLG-Feldtage展示会で開催された2014フィールドロボットイベントは、ロボットとその発明者に厳しい仮想テストを提供し、仮想視聴者にエキサイティングなエンターテイメントを提供しました。]

{kind=link}