































アブデラマン・レジェブ a 、Alireza Abdollahi b 、カリム・レジェブ c 、Horst Treiblmaier d,
- a ローマ大学経済学部経営法学科TorVergata、Via Columbia、2、Rome 00133、Italy
- b カラスミ大学経営学部経営学科、1599964511イラン、テヘラン
- c ビゼルト科学部、カルタゴ大学ザルゾナ、7021 ビゼルト、チュニジア
- d 国際経営学部、モジュル大学ウィーン、Am Kahlenberg 1、1190 ウィーン、オーストリア
| 記事情報 | 抽象 |
| キーワード: ドローン UAV(ドローン) 精密農業 モノのインターネット 計量書誌学 | 無人航空機(UAV)とも呼ばれるドローンは、ここ数十年で目覚ましい発展を遂げています。 農業では、彼らは農民に大幅なコスト削減を提供することによって農業慣行を変え、増加しました 運用効率、およびより良い収益性。 過去数十年にわたって、農業用無人機のトピックは 学術的な注目を集めました。 したがって、計量書誌学に基づいて包括的なレビューを実施します 既存の学術文献を要約して構造化し、現在の研究動向とホットスポットを明らかにします。 私達 計量書誌学的手法を適用し、農業用無人機を取り巻く文献を分析して要約し、 以前の研究を評価します。 私たちの分析によると、リモートセンシング、精密農業、深層学習、機械学習、モノのインターネットは、農業用無人機に関連する重要なトピックです。 共引用 分析により、文献にXNUMXつの広範な研究クラスターが明らかになりました。 この研究は、農業におけるドローン研究を要約し、将来の研究の方向性を示唆する最初の試みのXNUMXつです。 |
概要
農業は世界の主要な食料源であり (Friha et al., 2021)、深刻な課題に直面しています。
食品に対する需要の高まり、食品の安全性、セキュリティの懸念、および環境保護、水の保全、
サステナビリティ(井上、2020)。 世界人口は 9.7 年までに 2050 億人に達すると推定されているため、この発展は続くと予測されています。
(2019)。 農業は世界で最も顕著な水消費の例であるため、食料需要と水が期待されています
近い将来、消費は劇的に増加するでしょう。 さらに、肥料や農薬の消費の増加
農業活動の強化と相まって、将来の環境問題につながる可能性があります。 同様に、耕作可能な土地は限られており、
農家の数は世界的に減少しています。 これらの課題は、革新的で持続可能な農業ソリューションの必要性を強調しています(Elijah
et al。、2018; Friha et al。、2021; 井上、2020; Tzounis et al。、2017)。
これらの課題に対処するための有望なソリューションとして、新しいテクノロジーを組み込むことが確認されています。 スマート農業(Brewster et al。、
2017; このような議論の結果、Tang et al。、2021)と精密農業(Feng et al。、2019; Khanna&Kaur、2019)が登場しました。 The
前者は、効率と有効性を高めるために、情報通信技術(ICT)やその他の最先端のイノベーションを農業活動に採用するための一般的な概念です(Haque et al。、2021)。 後者は、土地が分割されるサイト固有の管理に焦点を当てています
均質な部分であり、各部分は、新しい技術によって作物収量の最適化のために正確な量の農業投入量を取得します(Feng et al。、2019; Khanna&Kaur、2019)。 この分野で学者の注目を集めている著名なテクノロジーには、ワイヤレスセンサーネットワーク(WSN)(J. Zheng&Yang、2018; Y. Zhou et al。、2016)、モノのインターネット(IoT)(Gill et al。、 2017; He et al。、2021; Liu et al。、2019)、
機械学習や深層学習などの人工知能 (AI) 技術 (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019)、コンピューティングテクノロジー(Hsu et al。、2020; Jinbo et al。、2019; Zamora-Izquierdo et al。、2019)、ビッグデータ(Gill et al。、2017; Tantalaki
et al。、2019)、およびブロックチェーン(PW Khan et al。、2020; Pincheira et al。、2021)。
上記の技術に加えて、リモートセンシングは改善の可能性が高い技術ツールと見なされてきました
スマートで精密な農業。 人工衛星、有人航空機、ドローンは、人気のあるリモート センシング技術です (Tsouros et al., 2019)。
無人航空機(UAV)、無人航空機システム(UAS)、および遠隔操縦航空機として一般に知られているドローンは、
他のリモートセンシング技術と比較して複数の利点があるため、非常に重要です。 たとえば、ドローンは
曇りの日の高品質で高解像度の画像(Manfreda et al。、2018)。 また、それらの可用性と転送速度は他を構成します
メリット (Radoglou-Grammatikis et al., 2020)。 航空機と比較して、ドローンは非常に費用対効果が高く、セットアップと保守が簡単です (Tsouros et al., 2019)。 当初は主に軍事目的で使用されていましたが、ドローンは、サプライ チェーン管理 (A. Rejeb, Rejeb, et al., 2021a) や人道目的 (A. Rejeb, Rejeb, et al., 2021c)、スマート農業、測量とマッピング、文化遺産の文書化、災害管理、森林と野生生物の保護 (Panday, Pratihast, et al., 2020)。 農業では、ドローンの多様な応用分野が存在します。新しいテクノロジー、コンピューティング機能、搭載センサーと統合して、作物管理 (マッピング、監視、灌漑、植物診断など) をサポートできるからです (H. Huang et al., 2021)。 、災害軽減、早期警報システム、野生生物および森林保護などがあります (Negash et al., 2019)。 同様に、ドローンは、作物と成長のモニタリング、収量の推定、水ストレスの評価、雑草、害虫、病気の検出など、いくつかの農業活動に活用できます (Inoue, 2020; Panday, Pratihast, et al., 2020)。 ドローンは、センサー データに基づく監視、推定、検出の目的だけでなく、精密な灌漑や、雑草、害虫、病気の精密な管理にも使用できます。 つまり、ドローンは環境データに基づいて正確な量の水と殺虫剤を散布することができます。 農業におけるドローンの利点を表 1 にまとめます。
農業におけるドローンの主な利点。
| 商品説明 | リファレンス(複数可) |
| 時間的および空間的を強化する センシング解像度 | (Gago et al。、2015; Niu et al。、2020; Srivastava 他、2020) |
| 精密農業を促進する | (L. Deng et al。、2018; Kalischuk et al。、2019; Maimaitijiang et al。、2017) |
| の分類と偵察 作物 | (井上、2020; Kalischuk et al。、2019; Lopez-´ Granados et al。、2016; Maimaitijiang et al。、2017; Melville et al。、2019; Moharana&Dutta、2016) |
| 肥料の使い方 | (L. Deng et al。、2018; Guan et al。、2019) |
| 干ばつの監視 | (Fawcett et al。、2020; Panday、Pratihast、et al。、 2020; 蘇ら、2018) |
| バイオマス推定 | (Bendig et al。、2014) |
| 収量推定 | (井上、2020; Panday、Shrestha、他、2020; Tao 他、2020) |
| 災害軽減 | (Negash et al。、2019) |
| 野生生物の保護と 林業 | (Negash et al。、2019; Panday、Pratihast、et al。、 2020) |
| 水ストレスの評価 | (井上、2020; J. Su、Coombes、et al。、2018; L. Zhang et al。、2019) |
| 害虫、雑草、病気 検出 | (Gaˇsparovi´c et al。、2020; Inoue、2020; J. Su、Liu、 et al。、2018; X. Zhang et al。、2019) |
一方、ドローンも制限に直面しています。 パイロットの関与、エンジン出力、安定性と信頼性、ペイロードによるセンサーの品質
重量制限、実装コスト、および航空規制は、それらの中にあります(C. Zhang&Kovacs、2012)。 欠点を比較します
表2のXNUMXつのモバイルリモートセンシング技術のうちのXNUMXつです。土壌センサーなどの他のリモートセンシング技術は、この調査の焦点を超えています。
さまざまなモバイルリモートセンシング技術の欠点。
| リモートセンシング 技術 | 欠点 | 参考文献 |
| ドローン (UAV) | パイロットの関与; 画像' 品質(平均); 実装コスト (平均); 安定性、操作性、および 信頼性; 標準化; エンジン出力; 限られた力 ソース(バッテリーの寿命); 限られた飛行時間、衝突 およびサイバー攻撃。 限定 ペイロード重量; 大規模なデータセット および限定的なデータ処理 機能; 規制の欠如; 専門知識の欠如、高いエントリー アクセスへの障壁 農業用無人機; | (Bacco et al。、2018; Dawaliby ら、2020; ハーディン& ハーディン、2010年; ハーディン& ジェンセン、2011年; Lagkas et al。、 2018; Laliberte et al。、2007; Laliberte&Rango、2011年; Manfreda et al。、2018、2018; Nebiker et al。、2008; プリ ら、2017; ベルサミーら、 2022; C. Zhang&Kovacs、 2012) |
| 衛星 | 定期的な衛星カバレッジ、 限られたスペクトル分解能; 可視性の問題に対する脆弱性 (例、雲); 利用不可 転送速度が遅い。 オリエンテーションとケラレ コストのかかる空間データに影響を与える コレクション; データ配信が遅い エンドユーザーへの時間 | (Aboutalebi et al。、2019; Cen ら、2019; チェンら、 2019; ナンセン&エリオット、 2016; パンデー、プラティハスト、 et al。、2020; サイヴィニート 他、2019) |
| 航空機 | 高い採用コスト; 複雑なセットアップ。 維持費; 信頼できるものが利用できない 飛行機、形状 画像; 非正規データ 取得; 柔軟性の欠如; 致命的な事故; センサーデータ 振動による変動; ジオリファレンスの問題 | (Armstrong et al。、2011; Atkinson et al。、2018; Barbedo&Koenigkan、2018; コバレフ&ボロシロヴァ、 2020; Suomalainen et al。、 2013; Thamm et al。、2013) |
農業における学際的かつ多目的な技術として、ドローンはさまざまな観点から研究されてきました。 たとえば、学者は農業におけるドローンの応用(Kulbacki et al。、2018; Mogili&Deepak、2018)、精密農業への貢献(Puri et al。、2017; Tsouros et al。、2019)、他との補完性を調査しました最先端の技術(Al-Thani et al。、2020; Dutta&Mitra、2021; Nayyar et al。、2020; Saha et al。、2018)、およびそれらのナビゲーションおよびセンシング機能を向上させる可能性(Barethetal。 、2015; Suomalainen et al。、2014)。 農業におけるドローンの応用に関する研究が普及しているため(Khan et al。、2021))、現存する文献を要約し、ドメインの知的構造を明らかにする必要があります。 さらに、継続的に改善されているハイテク分野として、構造化されたレビューを実施して、現存する文献を定期的に要約し、重要な研究ギャップを特定する必要があります。 に
日付、農業部門でのドローンのアプリケーションについて説明しているレビューはほとんどありません。 たとえば、Mogili and Deepak(2018)は、作物の監視と農薬散布に対するドローンの影響を簡単にレビューしています。 井上(2020)は、農業のリモートセンシングにおける衛星とドローンの使用のレビューを行っています。 著者は、ケーススタディとベストプラクティスに基づいて、スマートファーミングを採用することの技術的課題と衛星とドローンの貢献を探ります。 Tsourosetal。 (2019)さまざまなタイプのドローンとその農業における主な用途を要約し、さまざまなデータ取得および処理方法に焦点を当てています。 最近では、Aslanetal。 (2022)農業活動におけるUAVアプリケーションの包括的なレビューを実施し、温室内のUAVの同時ローカリゼーションとマッピングの関連性を強調しました。 Diaz-Gonzalezetal。 (2022)さまざまな機械学習技術とリモートに基づいた作物収量生産の最近の研究をレビューしました
センシングシステム。 彼らの調査結果は、UAVが土壌指標を推定するのに有用であり、空間分解能、情報の一時性、および柔軟性の点で衛星システムよりも優れていることを示しました。 Basirietal。 (2022)精密農業の文脈でマルチローターUAVの経路計画の課題を克服するためのさまざまなアプローチと方法の徹底的なレビューを行いました。 さらに、Awaisetal。 (2022)水の状態を推定するための作物におけるUAVリモートセンシングデータの適用を要約し、廃棄物ストレスアプリケーションのためのUAVリモートセンシングの予想される能力の詳細な統合を提供しました。 最後に、アクィラーニ等。 (2022)牧草地ベースの家畜システムに適用された予見農業技術をレビューし、UAVによって可能になったリモートセンシングがバイオマス評価と群れ管理に有利であると推定しました。
また、最近、家畜の監視、追跡、および集会にUAVを使用する取り組みが報告されています。
これらのレビューは新しく重要な洞察をもたらしますが、計量書誌学に基づく包括的で最新のレビューは文献に見られず、明確な知識のギャップがあります。 さらに、学術的生産が科学的領域で成長するとき、研究者が領域の知識構造を理解するために定量的レビューアプローチを採用することが不可欠になると述べられています(Rivera&Pizam、2015)。 同様に、Ferreiraetal。 (2014)研究分野が成熟し、複雑になるにつれて、学者は、新しい貢献を明らかにし、研究の伝統と傾向を捉え、どのトピックが研究されているかを特定し、分野と潜在的な研究の方向性。 Raparelli and Bajocco(2019)は、農林業におけるドローンアプリケーションの知識領域を調べるために計量書誌学的分析を実施しましたが、彼らの研究は1995年から2017年の間に発表された学術研究のみを考慮しており、この動きの速い地域のダイナミクスを反映していません。 さらに、著者は、この分野で最も影響力のある貢献を特定し、文献をクラスター化し、共引用分析を使用して知的構造を評価しようとはしませんでした。 結果として、現在の研究の焦点、傾向、およびホットスポットを明らかにするために文献を要約する必要があります。
この知識のギャップを埋めるために、私たちは定量的方法論と厳密な計量書誌学的手法を活用して、ドローンと農業の交差点での研究の現状を調査します。 現在の研究は、この分野のいくつかの側面を変える大きな可能性を提供するため、農業で非常に必要とされている新しい技術を調べることによって、既存の文献にいくつかの貢献をしていると主張します。 農業の文脈の中でドローンに関する知識が散在し断片化されていることを考えると、農業用ドローンの計量書誌学的分析の必要性はさらに感じられます。 同様に、農業用無人機に関する文献は、この研究分野の基盤を構築する最も影響力のある研究を考慮して、体系的にクラスター化する必要があります。 分析のメリットには、文献に示されている主要な研究テーマの明確化も含まれます。 テクノロジーの変革の可能性を考慮して、詳細なネットワーク分析は、影響力のある作業を決定し、ドローンの農業の可能性に関するテーマを明らかにすることによって、新しい洞察を生み出すと考えています。
したがって、私たちは以下の研究目的の達成に努めています。
- 農業分野でのドローンアプリケーションに卓越した貢献をした影響力のある出版物の特定。
- 文献のクラスタリング、研究焦点の特定、および共引用分析を使用した意味的類似性に基づく主要な「知的構造」研究のマッピング。
- この分野のさまざまな出版物の間での時間の経過に伴うリンケージと引用ネットワークの進化の理解、および将来の研究の方向性とホットなトピックの特定。
このホワイトペーパーの残りの部分は、次のように構成されています。セクション2では、方法論とデータ収集の手順の概要を説明します。 セクション3は、分析の結果を提供します。 セクション4では、調査結果について説明し、研究への貢献、影響、および将来の方向性で締めくくります。
方法論
この現在の調査研究では、農業におけるドローンのアプリケーションを調査するために計量書誌学的分析を実施します。 この定量的アプローチは、知識領域の知的構造(Arora&Chakraborty、2021)と、この方法を適用することによって調査できる現在の状況、ホットトピック、および将来の研究の方向性を明らかにします(Kapoor et al。、2018; Mishraetal。 、2017; A. Rejeb、Rejeb、et al。、2021b; A. Rejeb et al。、2021d; MA Rejeb et al。、2020)。 一般に、書誌分析は現存する文献を調べて、書かれたコミュニケーションの隠されたパターンと統計と数学的方法に基づいた分野の進化を要約して明らかにし、それは大規模なデータセットに適用されます(Pritchard、1969; Small、1999; Tahai&Rigsby 、1998)。 計量書誌学を使用することにより、類似性に基づいてドメインに寄与する既存のパラダイムと研究の焦点をよりよく理解することを目指しています(Thelwall、2008)。 計量書誌学は、方法論の客観的な定量的強さに裏打ちされた新しい洞察を提供します(Casillas&Acedo、2007)。 多くの学者がこれまで、農業、リモートセンシング、デジタルトランスフォーメーションなど、関連する分野で計量書誌学研究を実施してきました(Armenta-Medina et al。、2020; Bouzembrak et al。、2019; A. Rejeb、Treiblmaier、et al。、2021; Wamba &Queiroz、2021; Wang et al。、2019)。
引用分析
引用分析により、特定の研究分野に対するさまざまな洞察が明らかになります。 まず第一に、特定の研究分野に貢献し、大きな影響を与える最も影響力のある著者や出版物を明らかにするのに役立ちます(Gundolf&Filser、2013)。 第二に、知識の流れと著者間のコミュニケーションのつながりを明らかにすることができます。 最後に、引用された作品と引用された作品の間のリンクを追跡することにより、時間の経過に伴う知識ドメインの変化と進化を探ることができます(Pournader
et al。、2020)。 出版物の高い引用数は、その関連性と研究領域への実質的な貢献を反映しています(Baldi、1998; Gundolf&Filser、2013; Marinko、1998)。 出版物の引用分析は、関連する作品を特定し、それらの人気と進捗状況を経時的に追跡するのにも役立ちます。
共引用分析を文書化する
共引用分析は、出版物間の関係を調査し、分野の知的構造を描写するための貴重な方法です(Nerur et al。、2008)。 言い換えれば、最も引用された出版物とそれらの関係を特定することにより、この方法は出版物を別個の研究クラスターにグループ化し、クラスター内の出版物は定期的に同様のアイデアを共有します(McCain、1990; Small、1973)。 類似性は、出版物の調査結果が
結束し、互いに同意します。 出版物はトピックの類似性のために同じクラスターに属していますが、矛盾する視点を持つ可能性があります。
データの収集と分析
White と Griffith (1981) によって提案された方法論に従って、次の XNUMX つのステップを追求しながら、農業におけるドローン アプリケーションの研究領域全体をカバーするために、ジャーナル記事の包括的な検索を実行しました。
- 最初のステップはデータ収集でした。 Scopusは、標準化された結果を持つ最も包括的で信頼できるデータベースのXNUMXつとして選択されました。 農業におけるすべてのドローンアプリケーションに関連する出版物のメタデータが取得されました。 次に、選択した記事を分析し、トピック外の記事を分析から削除しました。
- 文献を分析し、研究分野で使用されている最も重要なキーワードを特定しました。
- 引用分析を使用して、著者とドキュメントの関係を調査し、基礎となる引用パターンを明らかにしました。 また、農業用無人機の分野に多大な貢献をした最も影響力のある著者や出版物を特定しました。
- 類似の出版物をクラスターにグループ化するために、共引用分析を実施しました。
- 最後に、国、機関、ジャーナル間のつながりとつながりを分析して、コラボレーションネットワークを描写しました。
適切な検索用語の特定
データ集約には次の検索文字列を適用しました:(ドローン*または「無人航空機」またはuav*または「無人航空機システム」」またはuas または「遠隔操縦航空機」)AND(農業OR農業OR農業OR農家)。 調査は 2021 年 2021 月に実施されました。ドローンには、UAV、UAS、遠隔操縦航空機など、いくつかの指定があります (Sah et al., 2021)。 農業に関連する特定の検索用語は、Abdollahi らの研究に基づいて特定されました。 (1)。 明確さと透明性のために、使用した正確なクエリを付録 1.6.16 に示します。データ クリーニング プロセスに続いて、引用および共引用分析の一般的なツールである BibExcel に読み込まれるテキスト ファイルを作成しました。 このツールは、他のソフトウェアとの簡単な対話も提供し、データの処理と分析においてかなりの自由度を提供します。 VOSviewer バージョン 2009 を使用して調査結果を視覚化し、計量文献ネットワークを生成しました (Eck & Waltman, 2020)。 VOSviewer は、特に参考文献マップを分析するために、さまざまな直感的な視覚化を提供します (Geng et al., 2021)。 さらに、結果をよりよく理解するのに役立つわかりやすい視覚的な結果を提供するのに役立ちます (Abdollahi et al., 5,085)。 上記の検索文字列を適用して、関連するすべての出版物を収集して保存しました。 最初の検索結果では、合計 4,700 のドキュメントが得られました。 選択されたサンプルの品質を確保するために、研究では査読済みのジャーナル記事のみが考慮され、その結果、書籍、章、会議議事録、編集ノートなどの他の種類のドキュメントは除外されました。 スクリーニング プロセスでは、無関係 (つまり、この作業の範囲外)、冗長 (つまり、二重索引による重複)、および非英語圏の出版物が除外されました。 このプロセスの結果、最終的な分析に XNUMX のドキュメントが含まれました。
調査結果と考察
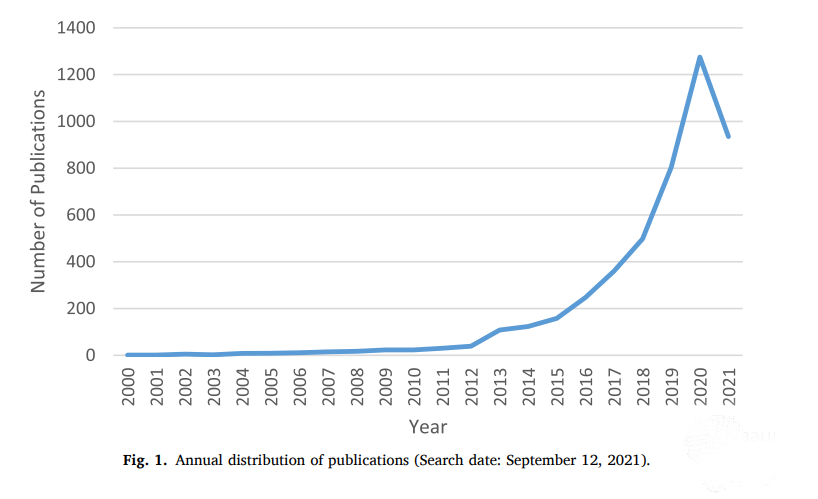
まず、農業用無人機に関する現在の文献の出版物の動向を分析しました。 学術研究の時間的分布を図1に示します。2011年(30冊)以降、出版物が急増しています。 そのため、分析期間を1990つの異なる段階に分割することにしました。 2010年から2010年までの期間をビルドアップ段階と呼び、年間約2010件の論文が発表されました。 2018年以降の期間は、農業におけるドローンの用途に関する研究がこの期間中に指数関数的に急増したことから、成長段階と呼ばれています。 2019年以降、出版物の数が増えることで、研究者の関心が高まっていることが確認されます。これは、ドローンがリモートセンシングに適用され、精密農業で使用されていることも反映しています(Deng et al。、2020; Maes&Steppe、108; Messina&Modica、2013 )。 具体的には、498年の2018件から1,275年には2020件に増加し、935年には2021件に達した。XNUMX年XNUMX月からXNUMX月中旬にかけて合計XNUMX件の記事が発行された。この期間は農業用無人機の最新かつ重要な微妙さを反映しているためです。
キーワード分析
著者が出版物のために選択するキーワードは、論文がどのように表現され、科学コミュニティ内でどのように伝達されるかに決定的な影響を及ぼします。 彼らは研究の主要な主題を特定し、繁栄または失敗する可能性を判断します(Day&Gastel、1998 .; Kim et al。、2016; Uddin et al。、2015)。 より広範な研究の傾向と方向性を明らかにするためのツールであるキーワード分析は、ドメイン内のすべての関連出版物のキーワードの編集を指します(Dixit&Jakhar、2021)。 現在の調査では、最も人気のあるトピックを調査するために、集約されたキーワードを2010つのセット(つまり、2011年と2021年から3年まで)に分割しました。 これを行うことで、両方のセットの重要なキーワードを追跡し、必要なすべてのデータを確実にキャプチャできます。 各セットについて、上位XNUMX個のキーワードを表XNUMXに示します。「ドローン」と「ドローン」、または同様に「モノのインターネット」と「IoT」などの意味的に同一のキーワードをマージすることで、矛盾を排除しました。
表3は、「無人航空機」が、両方の期間で「ドローン」および「無人航空機」と比較して、より頻繁に使用されるキーワードであることを示しています。 また、「リモートセンシング」「精密農業」「農業」は、両時期とも上位にランクされています。 第XNUMX期は「精密農業」がXNUMX位、第XNUMX期はXNUMX位でした。これは、ドローンが監視できるため、精密農業を実現する上でますます重要になっていることを示しています。
検出と推定は、他のリモートセンシングや地上ベースのシステムと比較して、より速く、より安く、より簡単に実行できます。 また、必要に応じて正確な量の投入物(水や農薬など)を散布することもできます(Guo et al。、2020; Inoue、2020; Panday、Pratihast、et al。、2020)。
最も頻繁に使用されるキーワードのリスト。
ランク | 1990-2010 | の番号 発生 | 2011-2021 | の番号 発生 |
| 1 | 無人航空機 自動車 | 28 | 無人 空中車両 | 1628 |
| 2 | リモートセンシング | 7 | 精度 農業 | 489 |
| 3 | 農業 | 4 | リモートセンシング | 399 |
| 4 | 空中 | 4 | ドローン | 374 |
| 5 | 精度 農業 | 4 | 無人 空中システム | 271 |
| 6 | 無人航空機 | 4 | 農業 | 177 |
| 7 | ハイパースペクトル センサー | 3 | 深い学習 | 151 |
| 8 | 人工ニューラル ネットワーク | 2 | 機械 学習 | 149 |
| 9 | 自律飛行 | 2 | 植生 インデックス | 142 |
| 10 | コーヒー | 2 | のインターネット 物事 | 124 |
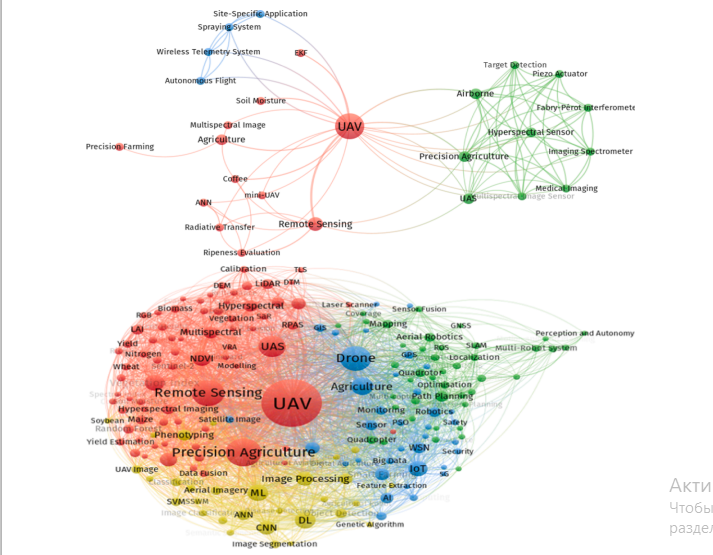
もうXNUMXつの興味深い機能は、補完的なテクノロジーの存在です。 最初の段階では、「ハイパースペクトルセンサー」と「人工ニューラルネットワーク」(ANN)が上位XNUMXのキーワードのXNUMXつです。 ハイパースペクトルイメージングは、さまざまな波長で膨大な数の画像を収集することにより、従来のイメージングに革命をもたらしました。 そうすることで、センサーは、マルチスペクトルイメージング、分光法、およびRGBイメージと比較して、より優れた空間情報とスペクトル情報を同時に収集できます(Adao〜et al。、
2017)。 第2020段階で「ANN」、第2019段階で「深層学習」(DL)と「機械学習」(ML)が発生するということは、公開された作品のほとんどが、ドローンに対するAI技術の可能性の調査に焦点を合わせていることを意味します。ベースの農業。 ドローンは自律的に飛行することができますが、それでもパイロットの関与が必要であり、これはデバイスインテリジェンスのレベルが低いことを意味します。 ただし、この問題はAI技術の進歩により解決でき、状況認識と自律的な意思決定支援を向上させることができます。 AIを搭載したドローンは、ナビゲーション中の衝突を回避し、土壌と作物の管理を改善し(Inoue、XNUMX)、人間の労力とストレスを軽減します(BK Sharma et al。、XNUMX)。
膨大な量の非線形データを処理する柔軟性と能力により、AI技術は、予測と意思決定のためにドローンやその他のリモートセンシングおよび地上ベースのシステムによって送信されたデータを分析するのに適した方法です(Ali et al。、2015;井上、2020)。 さらに、第2018期の「IoT」の存在は、農業におけるその新たな役割を示しています。 IoTは、ドローン、ML、DL、WSN、ビッグデータなどの他のテクノロジーを相互接続することで、農業に革命をもたらしています。 IoTを実装する主な利点の2019つは、さまざまなタスク(データ取得、データ分析と処理、意思決定、および実装)をほぼリアルタイムで効率的かつ効果的にマージできることです(Elijah et al。、2019; Fengetal。 、2015; Muangprathub et al。、2)。 さらに、ドローンは、植生の活力と植生特性を計算するために必要なデータを取得するための効率的なツールと見なされています(Candiago et al。、2)。 図XNUMXaとXNUMXbは、両方の期間のキーワード共起ネットワークを示しています。
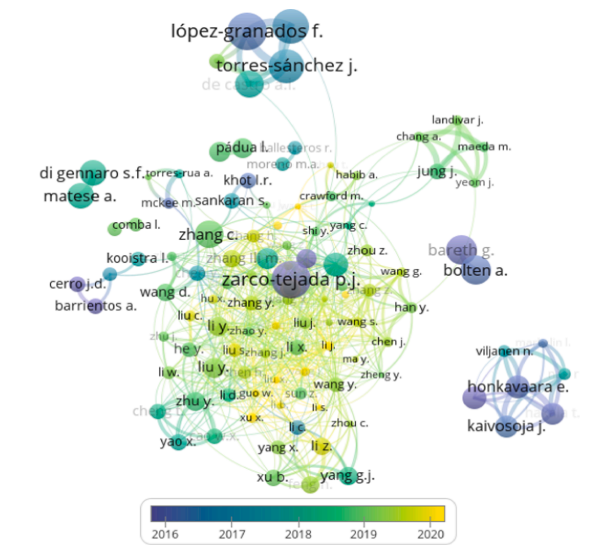
影響力のある著者
このセクションでは、影響力のある著者を特定し、著者引用ネットワークが現在の文献をどのように視覚化して整理できるかを調べます。 図3は、引用数が最も多いすべての研究者の時系列のオーバーレイを示しています。 カラースケールは、著者の引用の年ごとの変化を反映しています。 農業用無人機に関する研究を発表した研究者の引用構造を、最低50件の引用とXNUMX件の出版物のしきい値を使用して調べます。 から
12,891人の著者、115人だけがこの条件を満たす。 表4に、影響力のある上位1,963人の著者を、引用の最大数でソートして示します。 Lopez- Granados F.が1,909件の引用でリストをリードし、続いてZarco-TejadaPJがXNUMX件の引用でリストをリードしています。
最も引用された著者のリスト。
| ランキング | 著者 | 引用 |
| 1 | Lopez-Granados´F。 | 1,963 |
| 2 | ザルコ-テハダPJ | 1,909 |
| 3 | ペナ ~ JM | 1,644 |
| 4 | トレス-S´ アンチェスJ。 | 1,576 |
| 5 | フェレレスE | 1,339 |
| 6 | レモンディーノ F | 1,235 |
| 7 | ボルテンA | 1,160 |
| 8 | バレスG | 1,155 |
| 9 | ベルニJA | 1,132 |
| 10 | デ カストロ AI | 1,036 |
個々の出版物に関しては、Zhang and Kovacs(2012)の記事が、PrecisionAgricultureで最も引用されている研究です。 ここでは、著者は精密農業におけるUASの適用をレビューしました。 彼らの調査結果は、信頼できる最終製品を農家に提供するために、プラットフォームの設計、生産、画像ジオリファレンスの標準化、および情報検索ワークフローを進める必要があることを示唆しています。 さらに、彼らは、特にフィールド計画、画像キャプチャ、およびデータの解釈と分析において、農民をより強く関与させることを推奨しています。 重要なことに、この研究は、フィールドマッピング、活力マッピング、化学物質含有量の測定、植生ストレスの監視、および植物の成長に対する肥料の影響の評価におけるUAVの重要性を最初に示したもののXNUMXつです。 このテクノロジーに関連する課題には、法外なコスト、センサー機能、プラットフォームの安定性と信頼性、標準化の欠如、大量のデータを分析するための一貫した手順も含まれます。
引用分析
引用分析は、記事の影響の研究を表しますが、流れが発生しやすい(たとえば、引用バイアス、自己引用)は、影響評価の標準的な手段の1996つと見なされます(Osareh、2022; A. Rejeb et al。、2010; Sarli et al。、2022)。 引用はまた、特定のトピックに関する文献への論文の貢献の重要性と活力を反映しています(R. Sharma et al。、5)。 農業用無人機に関する最も影響力のある研究を決定するために引用分析を実施し、その内容を要約しました。 表1990は、2010年から2011年および2021年から2009年の期間に最も影響力のあった2010の論文のリストを示しています。 Berniらによる記事。 (1990)bとAustin(2010)は、831年と498年に最も引用されており、それぞれ2009件と2009件の引用があります。 Bernietal。 (2010)bは、手頃な価格の熱および狭帯域マルチスペクトル画像センサーを装備したヘリコプターベースのUAVを介して定量的リモートセンシング製品を開発する可能性を示しました。 従来の有人航空機搭載センサーと比較して、農業用の低コストのUAVシステムは、作物の生物物理学的パラメーターの同等の推定を達成することができます。 手頃なコストと運用の柔軟性に加えて、迅速なターンアラウンドタイムで利用可能な高いスペクトル、空間、および時間分解能により、UAVは、灌漑スケジューリングや精密農業など、タイムクリティカルな管理を必要とするさまざまなアプリケーションに適しています。 Berniらの論文。 (XNUMX)bは、無人回転翼プラットフォームとデジタルおよび熱センサーを農業用途に必要なキャリブレーションメカニズムと効果的に統合したため、高く評価されています。 XNUMX番目に引用されている出版物は、設計、開発、および展開の観点からUAVについて説明したAustin(XNUMX)によって作成された本です。 農業では、UAVは、作物の色の変化を通じて病気を早期に検出し、作物の播種と噴霧を容易にし、群れを監視および運転することにより、作物の監視をサポートします。
サリバンらの研究。 (2007)、Lummeetal。 (2008)、およびGokto¨ǧanetal。 (2010)最も引用された上位XNUMXの記事のリストを完成させます。 これらの記事は、農業をサポートするためのUAVベースのシステムの開発を示しています。 作物の監視とスキャン、雑草の監視と管理、意思決定支援など、さまざまな問題の解決策を提供します。 彼らはまた、サンプリング効率を高め、農家が正確で効果的な方法を考案するのを支援するUAVの能力を提案し、議論します
植栽戦略。 Berniが2009つの論文を執筆し(Berni et al。、2009b; Berni et al。、2014a)、農業用無人機関連の研究に対する彼の重要な影響を強調しています。 Zarco-Tejada他からの論文。 (XNUMX)は、樹高の定量化に低コストのUAV画像を使用する必要性を説明する先駆的な研究のXNUMXつです。
最も引用されている出版物のリスト。
| ランク | 1990から2010へ | 2011から2021へ | ||
| ドキュメント | 引用 | ドキュメント | 引用 | |
| 1 | (Berni et al。、2009b) | 831 | (C. Zhang & Kovacs、 2012) | 967 |
| 2 | (オースティン、2010年) | 498 | (ネックス&レモンディーノ、 2014) | 893 |
| 3 | (Hunt et al。、2010) | 331 | (Floreano&Wood、 2015) | 552 |
| 4 | (SR ヘルヴィッツら、 2004) | 285 | (Hossein Motlagh et al。、 2016) | 391 |
| 5 | (CCD Lelong et al。、 2008) | 272 | (Shakhatreh et al。、 2019) | 383 |
| 6 | (Berni et al。、2009b) | 250 | (Ma et al。、2017) | 373 |
| 7 | (Grenzdorffer ¨ ら、 2008) | 198 | (Bendig et al。、2014) | 360 |
| 8 | (Hrabar et al。、2005) | 175 | (Zarco-Tejada et al。、 2014) | 347 |
| 9 | (Y. Huang et al。、2009) | 129 | (広告 ao et al。、2017) | 335 |
| 10 | (Schmale III et al。、 2008) | 119 | (Honkavaara et al。、 2013a) | 331 |
| 11 | (Abd-Elrahman et al。、 2005) | 79 | (Candiago et al。、2015) | 327 |
| 12 | (Techy et al。、2010) | 69 | (Xiang&Tian、2011) | 307 |
| 13 | (Sullivan et al。、2007) | 51 | (Matese et al。、2015) | 303 |
| 14 | (Lumme et al。、2008) | 42 | (Gago et al。、2015) | 275 |
| 15 | (Gokto¨ǧanetal。、2010) | 40 | (Aasen et al。、2015a) | 269 |
第2011期(2021〜2012年)では、Zhang and Kovacs(2014)およびNex and Remondino(2012)による調査の結果、最も頻繁に引用された出版物が得られました。 Zhang and Kovacs(2012)は、精密農業は、地理情報システム、GPS、リモートセンシングなどの地理空間技術とセンサーを実装して、フィールドの変動をキャプチャし、代替戦略を採用することでそれらを処理することでメリットが得られると主張しています。 精密農業のゲームチェンジャーとして、ドローンの採用はリモートセンシングの新時代を告げ、空中観察を簡素化し、作物の成長データ、土壌の状態、散布エリアをキャプチャします。 Zhang and Kovacs(XNUMX)のレビューは、プラットフォームとカメラの制限、データ処理の課題、農家の関与、航空規制など、環境モニタリングと精密農業におけるこれらのデバイスの既存の使用法と課題を明らかにすることにより、UAVへの洞察を提供するため重要です。 。 二番目
Nex and Remondino(2014)からの最も引用された研究は、地球画像をキャプチャ、処理、および分析するためのUAVの最先端をレビューしました。
彼らの仕事はまた、UAV画像処理の最新の進歩を紹介し、いくつかのUAVプラットフォーム、アプリケーション、およびユースケースの概要を示しました。 農業では、農民はUAVを使用して、コストと時間の節約を達成し、損害の迅速かつ正確な記録を受け取り、起こりうる問題を予測するための効果的な意思決定を行うことができます。 従来の空中プラットフォームとは対照的に、UAVは、高精度の可能性を維持しながら、運用コストを削減し、過酷な場所でのアクセスの危険性を減らすことができます。 彼らの論文は、特に精度と解像度の観点から、UAVのさまざまな利点をまとめています。
2011年から2021年の間に最も引用された残りの2014の出版物の中で、イメージングミッションでのドローンアプリケーションに関連する研究への集中度が高まっていることに気づきました(Bendig et al。、2017; Ma et al。、2014; Zarco-Tejada et al。、2015) 、精密農業(Candiago et al。、2013; Honkavaara et al。、2015a)、精密ブドウ栽培(Matese et al。、2015)、水ストレス評価(Gago et al。、2015)、および植生モニタリング(Aasenetal。 、XNUMXa)。 初期の頃、研究者は焦点を合わせました
農業向けの低コスト、軽量、正確なUAVベースのシステムの開発に関する詳細。 最近の研究では、農業および現地調査のためのUAVアプリケーションのレビューに焦点が当てられています。 要約すると、この分析は、影響力のある出版物が、UAVの現在の科学的および技術的状況を評価するための以前の研究のレビューを提供し、精密農業をサポートするUAVシステムを開発したことを明らかにしています。 興味深いことに、経験的な研究を採用した研究は見つかりませんでした
方法論または記述的なケーススタディ。これは重要な知識のギャップを構成し、このトピックに関するさらなる研究を必要とします。
共引用分析
Gmür(2006)によると、共引用分析は類似の出版物を特定し、それらをクラスター化します。 クラスターを注意深く調べると、出版物に共通する研究分野が明らかになります。 農業用無人機に関連する文献の共引用を調査して、関連する主題分野を説明し、出版物の知的パターンを検出します。 この点で、Small(1973)は、最も影響力のある独創的な研究を研究するために、共引用分析の使用を推奨しました。
分野内。 セットを最も重要な記事(Goyal&Kumar、2021)に制限するために、共引用のしきい値を25に設定しました。これは、25以上の異なる出版物の参照リストで1つの記事が一緒に引用されている必要があることを意味します。 クラスタリングも最小クラスターサイズ6で実行され、小さなクラスターを大きなクラスターにマージする方法はありませんでした。 その結果、研究の類似性とその知的構造に基づいて、XNUMXつのクラスターが生成されました。 表XNUMXは、各クラスターでの出版物の分布を示しています。
クラスター1:このクラスターには、後に公開された2018のドキュメントが含まれています。このクラスターの出版物では、環境モニタリング、作物管理、および雑草管理のサポートにおけるドローンの役割について説明しています。 たとえば、Manfredaetal。 (XNUMX)自然農業生態系モニタリングにおけるUAVの現在の研究と実装の概要を提供し、この技術が環境モニタリングを大幅に強化し、削減するための途方もない可能性を提供すると主張します
野外観測と従来の空中および宇宙搭載リモートセンシングとの間の既存のギャップ。 これは、手頃な方法で広い領域への時間的検索と空間的洞察を改善するための新しい機能を提供することによって行うことができます。 UAVは常に環境を感知し、結果のデータをインテリジェントな集中型/分散型エンティティに送信して、センサーを制御し、病気の欠如や水の検出などの最終的な問題を特定できます(Padua´ et al。、2017)。 アダオ〜他(2017)UAVは、水の状態、バイオマス推定、および活力評価に関連する膨大な量の生データを取得することにより、植物の状態を評価するのに理想的であると仮定します。 UAVに取り付けられたセンサーは、適切な環境条件で迅速に展開して、リモートセンシングデータをタイムリーにキャプチャできるようにすることもできます(Von Bueren et al。、2015)。 UAVを使用すると、農家は屋内農業環境の2015次元空間(温室など)のほぼすべての場所から測定値を取得することで屋内農業活動を実行できるため、地域の気候制御と植物の監視が保証されます(Roldan´ et al 。、XNUMX)。 精度の文脈で
農業、作物管理の決定には、適切な時間的および空間的解像度を備えた正確で信頼性の高い作物データが必要です (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019)。 このため、Agüera Vega et al。 (2015) UAV 搭載のマルチスペクトル センサー システムを使用して、生育期のヒマワリの画像を取得しました。 同様に、黄等。 (2009) UAV に基づくリモート センシングは、収集されたスペクトル データからの作物と土壌の測定を容易にする可能性があることに注意してください。 バーガー等。 (2014) コムギとナタネ作物に焦点を当てた、精密農業アプリケーションでの UAV 反射率測定から緑地指数 (GAI) を推定する手法を開発し、テストしました。 したがって、ドローンは、頻繁な再訪と高い空間分解能により、作物の状態情報を取得するための新しい可能性を提供します (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016)。
農業用無人機に関する影響力のある出版物のクラスタリング。
| クラスタ | 幅広いテーマ | 参考文献 |
| 1 | 環境モニタリング、作物 管理、雑草管理 | (広告 ao et al., 2017; アグエラ・ベガ et al。、2015; de Castro et al。、2018; Gomez-Cand´on´ et al。、2014; YB Huang et al。、2013; Khanal et al。、 2017; Lopez-Granados、´2011; Manfreda et al。、2018; P´ アドゥアら、 2017; Pena〜et al。、2013; P´erez-Ortiz et al。、2015; Rasmussen et al。、2013、 2016; トレス-S´ anchez et al。、2014; Torres-Sanchez、´ Lopez-Granados、´ & ペナ、〜2015; Verger et al。、2014; フォン Bueren et al。、2015; C.チャン& Kovacs、2012) |
| 2 | リモート表現型、収量 推定、作物表面モデル、 植物の数え方 | (Bendig et al。、2013、2014; Geipel et al。、2014; グナディンガー¨& Schmidhalter、2017; Haghighattalab et al。、2016; Holman et al。、2016; ジン et al。、2017; W. Li et al。、2016; Maimaitijiang et al。、2017; サンカラン et al。、2015; Schirrmann et al。、2016; Shi et al。、2016; Yue et al。、2017; バツ。 Zhou et al。、2017) |
| 3 | 水の熱画像、 マルチスペクトルイメージング | (Baluja et al。、2012; Berni et al。、 2009b; ベルニら、2009a; カンディアゴ et al。、2015; Gago et al。、2015; Gonzalez-Dugo et al。、2013、2014; グレンツドルフファー¨etal。、2008; ハリク et al。、2019; Matese et al。、2015; Ribeiro-Gomes et al。、2017; Santesteban et al。、2017; 宇藤ほか、 2013) |
| 4 | ハイパーセクトラルイメージング、スペクトル イメージング | (Aasen et al。、2015a; Bareth et al。、 2015; Hakala et al。、2013; Honkavaara et al。、2013a; ルシエ ら、2014; サーリら、2011 年。 Suomalainen et al。、2014) |
| 5 | 3D マッピング アプリケーション | (Jim´enez-Brenes et al。、2017; Nex& レモンディーノ、2014年。 サラミら、 2014; トレス-S´ アンチェス、ロペス-´ Granados、Serrano、et al。、2015; Zahawi et al。、2015; ザルコ・テハダ 他、2014) |
| 6 | 農業監視 | (SR Herwitz et al。、2004; Hunt et al。、2010; CCD Lelong et al。、 2008; プリミセリオら、2012; 翔 &Tian、2011) |
さらに、ドローンは、雑草のマッピングなど、農業における困難な作業に役立ちます。 デバイスによってキャプチャされた画像は、フィールドでの早期の雑草検出に有用であることが証明されています(de Castro et al。、2018; Jim´enez-Brenes et al。、2017; Lam et al。、2021; Lopez-Granados´ et al。、 2016; Rozenberg et al。、2021)。 この点で、de Castroetal。 (2018)UAV画像とオブジェクトベースの画像分析(OBIA)の統合により、開業医は、雑草研究の大きな前進である、初期の草地作物の早期検出の自動化の問題を克服できるようになったと考えています。 同様に、Pena〜etal。 (2013)UAVからの超高空間解像度画像をOBIA手順と組み合わせて使用すると、季節内の雑草防除対策の実施計画に使用できる初期のトウモロコシ作物の雑草マップを生成できることを指摘します。衛星および従来の空中画像の能力を超えたタスク。 画像分類またはオブジェクト検出アルゴリズムと比較して、セマンティックセグメンテーション技術は雑草マッピングタスクでより効果的であり(J. Deng et al。、2020)、したがって農家は畑の状態を検出し、損失を軽減し、成長期を通して収量を向上させることができます(Ramesh et al。、2020)。 深層学習ベースのセマンティックセグメンテーションは、高解像度の航空画像から植生被覆の正確な測定を提供することもできます(Ramesh et al。、2020; A. Zheng et al。、2022)。 リモートの可能性にもかかわらず
ピクセル分類の検知、セマンティックセグメンテーション技術には、大量の計算と非常に高いGPUメモリが必要です(J. Deng et al。、2020)。
機械学習とUAVに基づいて、P´erez-Ortizetal。 (2015)農民が初期の出芽後の雑草防除を採用するとき、サイト固有の雑草防除戦略を提供するための雑草マッピングアプローチを提案しました。 最後に、Rasmussenetal。 (2013)ドローンは、優れた空間分解能の柔軟性を備えた安価なセンシングを提供することを強調しました。 全体として、このクラスターの出版物は、リモートセンシング、作物モニタリング、および雑草マッピングをサポートするUAVの可能性を探求することに焦点を当てています。 環境モニタリング、作物管理、雑草マッピングにおけるドローンの適用がより持続可能な農業をどのように達成できるかをさらに調査するには、追加の詳細な研究が必要です(Chamuah&Singh、2019; Islam et al。、2021; Popescu et al。、2020; J .Su、Liu、et al。、2018)そして作物保険アプリケーションにおけるこの技術のガバナンス問題に対処します(Basnet&Bang、2018; Chamuah&Singh、2019、2022; Meinen&Robinson、2021)。 研究者は、UAVで収集された測定値を効率的な処理技術で検証して、処理されたデータの究極の品質を向上させることに集中する必要があります(Manfreda et al。、2018)。 さらに、デジタル画像に雑草を表示するピクセルを認識し、UAV雑草マッピング中に無関係な背景を排除する適切なアルゴリズムの開発が必要です(Gaˇsparovi´c et al。、2020; Hamylton et al。、2020; H. Huangetal。 、2018、2020; Lopez-´Granados et al。、2016)。 植物認識、葉の分類、および病気のマッピングにおけるセマンティックセグメンテーション技術の採用に関する追加の研究を歓迎します(Fuentes-Pacheco et al。、2019; Kerkech et al。、2020)。
クラスター2。このクラスターの出版物は、農業用無人機のいくつかの側面に焦点を当てています。 リモート表現型に関連して、Sankaran等。 (2015)UAVを使用した低高度、高解像度の空中イメージングを使用して、畑の作物の迅速な表現型を特定する可能性を検討しました。彼らは、地上のセンシングプラットフォームと比較して、適切なセンサーを備えた小型のUAVにはいくつかの利点があると主張しています。 、フィールドへのより簡単なアクセス、高解像度データ、効率的なデータ収集など。
フィールドの成長条件の迅速な評価、および低い運用コスト。 ただし、著者は、フィールド表現型のUAVの効果的な適用は、UAVの機能(安全性、安定性、測位、自律性など)とセンサーの特性(解像度、重量、スペクトル波長、フィールドなど)の2016つの基本要素に依存していることにも注目しています。ビューの)。 Haghighattalabetal。 (2016)UAV画像からプロットレベルのデータを取得し、繁殖プロセスを加速するための半自動画像処理パイプラインを提案しました。 Holmanetal。 (XNUMX)高値を開発
スループットフィールド表現型システムであり、UAV が高品質で大量のフィールドベースの表現型データを収集できること、およびこのデバイスが広い領域と異なるフィールドの場所で効果的であることを強調しました。
歩留まりの推定は非常に重要な情報であるため、特に時間どおりに利用できる場合、UAVがすべてのフィールド測定を提供し、高品質のデータを効率的に取得する可能性があります(Daakir et al。、2017; Demir et al。、2018 ; Enciso et al。、2019; Kulbacki et al。、2018; Pudelko et al。、2012)。 この点で、ジン等。 (2017)は、非常に低い高度でUAVによって取得された高解像度画像を利用して、出現段階での小麦植物密度を推定する方法を開発および評価しました。 著者によると、UAVはカメラを備えたローバーシステムの制限を克服し、作物の植物密度を推定する非侵襲的な方法を表し、農民が土壌の通行性に関係なくフィールド表現型に必要なハイスループットを達成できるようにします。 Lietal。 (2016)UAVベースのシステムを使用して、非常に高解像度で何百ものステレオ画像を収集し、林冠の高さや地上のバイオマスなどのトウモロコシのパラメーターを推定しました。 最後に、Yueetal。 (2017)UAVから決定された作物の高さが地上バイオマス(AGB)の推定を強化できることを発見しました。
作物の成長を監視するアプローチは、作物表面モデルを開発するというアイデアです (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021)。 いくつかの研究は、植物の高さをキャプチャし、その成長を監視するために UAV から撮影した画像の実現可能性を強調しています。 たとえば、ベンディグら。 (2013) は、UAV を使用して 0.05 m 未満の非常に高い解像度を持つマルチテンポラル作物表面モデルの開発について説明しました。 彼らは作物を検出することを目的としました
成長の変動性とその作物処理、栽培品種、およびストレスへの依存性。 ベンディグら。 (2014)UAVを使用して、作物表面モデルから抽出された植物の高さに基づいて新鮮なバイオマスと乾燥したバイオマスを推定し、空中プラットフォームや地上レーザースキャンとは異なり、UAVからの高解像度画像は、さまざまな成長に対する植物の高さモデリングの精度を大幅に向上させることができることを発見しましたステージ。 同じように、Geipeletal。 (2014)画像を取得するための研究でUAVを使用しました
シーズン初期からシーズン中期までの2017つの異なる成長段階でのトウモロコシの穀物収量予測のデータセットは、空中画像と作物表面モデルに基づくスペクトルおよび空間モデリングの組み合わせが、シーズン中期のトウモロコシ収量を予測するための適切な方法であると結論付けました。 最後に、Gnadinger¨とSchmidhalter(2)は、精密表現型におけるUAVの有用性を調査し、この技術の使用が農場管理を強化し、育種と農学の目的での野外実験を可能にする可能性があることを強調しました。 全体として、クラスターXNUMXの出版物は、リモートでのUAVの主な利点に焦点を当てていることがわかります。
表現型、収量推定、作物表面モデリング、および植物カウント。 将来の研究では、リモートセンシングデータの処理を自動化および最適化できるリモート表現型の新しい方法を開発することで、さらに深く掘り下げることができます(Barabaschi et al。、2016; Liebisch et al。、2015; Mochida et al。、2015; S. Zhou etal。 。、2021)。 さらに、UAVに搭載されたIoTセンサーのパフォーマンスと、それらのコスト、労力、および歩留まり推定の精度の間のトレードオフを調査する必要があります。
将来(Ju&Son、2018a、2018b; Xie&Yang、2020; Yue et al。、2018)。 最終的には、信頼できる情報を生成し、農業生産の効率を最大化し、農家の手作業によるカウント作業を最小限に抑えることができる効率的な画像処理方法を開発する必要があります(RU Khan et al。、2021; Koh et al。、2021; Lin &Guo、2020; C. Zhang et al。、2020)。
クラスター 3. このクラスターの出版物では、UAV プラットフォームで使用される農業資源のリモート センシング用のさまざまなタイプの画像システムについて説明しています。 この点で、サーマル イメージングを使用すると、表面温度を監視して作物の損傷を防ぎ、干ばつストレスを早期に検出できます (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; ヨム、2021)。 バルジャ等。 (2012) は、マルチスペクトル カメラとサーマル カメラの搭載は、
UAVにより、研究者は高解像度の画像を取得し、ブドウの木の水の状態を評価することができました。 これは、リモートセンシングデータを使用して新しい水スケジューリングモデルを開発するのに役立つ可能性があります(Baluja et al。、2012)。 のために
UAVの限られた負荷容量、Ribeiro-Gomesetal。 (2017)は、非冷却サーマルカメラをUAVSに統合して、プラント内の水ストレスを測定することを検討しました。これにより、このタイプのUAVは、従来の衛星ベースのリモートセンシングや冷却サーマルカメラを搭載したUAVよりも効率的で実行可能になります。 著者によると、非冷却サーマルカメラは冷却カメラよりも軽量であるため、適切なキャリブレーションが必要です。 Gonzalez-Dugoetal。 (2014)は、熱画像が、柑橘類の果樹園内および果樹園内の水状態を評価し、水ストレスを定量化するための作物の水ストレス指標の空間マップを効果的に生成することを示しました。 Gonzalez-Dugoetal。 (2013)およびSantestebanetal。 (2017)商業果樹園とブドウ園の水状態の変動性を推定するために、高解像度UAV熱画像の使用を調査しました。
マルチスペクトルイメージングは、従来のRGB(赤、緑、青)画像と比較して大量のデータを提供できます(Ad〜ao et al。、2017; Navia et al。、2016)。 このスペクトルデータは、空間データとともに、分類、マッピング、予測、予測、および検出の目的に役立つ可能性があります(Berni et al。、2009b)。 Candiagoらによると。 (2015)、UAVベースのマルチスペクトルイメージングは、信頼性が高く効率的なリソースとして、作物の評価と精密農業に大きく貢献する可能性があります。 また、
ハリク等。 (2019) は、衛星と UAV ベースのマルチスペクトル イメージングを比較しました。 UAV ベースの画像は、ブドウ園の変動性と作物の樹冠を表す活力マップをより正確に表現する結果となりました。 簡単に言うと、このクラスターの記事では、農業用 UAV への熱およびマルチスペクトル イメージング センサーの組み込みについて説明しています。 したがって、サーマルおよびマルチスペクトル イメージングを AI と統合する方法を理解するには、さらなる研究が必要です。
植物のストレスを検出するための手法(例:深層学習)(Ampatzidis et al。、2020; Ampatzidis&Partel、2019; Jung et al。、2021; Santesteban et al。、2017; Syeda et al。、2021)。 このような洞察は、植物の成長、ストレス、生物季節学の監視だけでなく、より効率的で正確な検出を確実にするのに役立ちます(Buters et al。、2019; Cao et al。、2020; Neupane&BaysalGurel、2021; L. Zhou et al。、 2020)。
クラスター4。このクラスターは、農業慣行のサポートにおけるスペクトルイメージングとハイパースペクトルイメージングの重要な役割を中心に展開する2009つの論文で構成されています。 ハイパースペクトルイメージングは、地球システムの定量的評価を可能にするリモートセンシング手法としての地位を確立しています(Schaepman et al。、XNUMX)。より正確には、表面物質の識別、(相対)濃度の定量化、および表面成分比率の割り当て
混合ピクセル内(Kirsch et al。、2018; Zhao et al。、2022)。 言い換えれば、ハイパースペクトルシステムによって提供されるより高いスペクトル分解能により、菜食主義の特性や葉の含水量などのさまざまなパラメーターのより正確な推定が可能になります(Suomalainen et al。、2014)。 このクラスターの研究者は、そのようなシステムのさまざまな側面を調査しました。 とりわけ、Aasen等。 (2015b)軽量からXNUMX次元ハイパースペクトル情報を導出するための独自のアプローチを提供しました
植生モニタリングのためにUAVで使用されるスナップショットカメラ。 Lucieeretal。 (2014)は、新しいハイパースペクトルUASの設計、開発、空中操作、およびそれを使用して収集された画像データのキャリブレーション、分析、解釈について説明しました。 最後に、Honkavaaraetal。 (2013b)FabryPerot干渉計ベースのスペクトル画像の包括的な処理アプローチを開発し、精密農業のバイオマス推定手順での使用を示しました。 この現在のクラスターの潜在的な将来の経路には、センサー技術の技術的改善の必要性(Aasen et al。、2015b)と、補完的な技術、特にビッグデータと分析の組み込みと強化の必要性の強調が含まれます(Ang&Seng、2021; Radoglou -Grammatikis et al。、2020; Shakoor et al。、2019)。 後者は主に、スマート農業に実装されたさまざまなセンサーによって生成された増え続けるデータに由来します(C. Li&Niu、2020; A. Rejeb et al。、2022; Y. Su&Wang、2021)。
クラスター5。このクラスターの出版物は、ドローンベースの3Dマッピングアプリケーションを調査しました。 3Dマッピングにドローンを使用すると、複雑なフィールドワークが軽減され、効率が大幅に向上する可能性があります(Torres-Sanchez´ et al。、2015)。 クラスター内の2015つの記事は、主にプラント監視アプリケーションに焦点を当てています。 たとえば、林冠面積、樹高、樹冠体積に関する2014次元データを取得するには、Torres-Sanchez´etal。 (2017)UAVテクノロジーを使用してデジタル表面モデルを生成し、次にオブジェクトベースの画像分析(OBIA)アプローチを使用しました。 さらに、Zarco-Tejadaetal。 (3)UAV技術とXNUMX次元写真再構成法を統合することによって木の高さを定量化しました。 Jim´enez-Brenes Lopez-Granados、´De Castro、他(XNUMX)UAV技術を高度なOBIA方法論と統合することにより、数十本のオリーブの木を多時期にXNUMXDで監視するための新しいプロセスを実証しました。 このクラスターでの将来の作業のための興味深い経路には、現在の改善のいずれかが含まれます
OBIA (de Castro et al., 2014, 2017; Ventura et al. 、2016)、および写真の再構成または新しい方法の開発 (Díaz-Varela et al., 2018; Torres-S´ anchez et al., 2020)。
クラスター6。このクラスターでは、農業監視におけるドローンの役割について説明します。 UAVは、衛星および航空機のイメージングの欠点を補完し、克服することができます。 たとえば、燃料やパイロットの課題が少なく、高解像度のほぼリアルタイムのイメージングを提供できるため、継続的かつリアルタイムの監視と意思決定の改善が実現します(S. Herwitz et al。、2004)。 UAVのもう2010つの重要な貢献は、精密農業またはサイト固有の農業のためのサイト固有のデータを提供する能力です。さまざまなパラメーターに関する詳細なデータにより、農民は土地を均質な部分に分割し、それに応じて処理することができます(Huntetal。 、2008; CC Lelong et al。、2012; Primicerio et al。、2004)。 このようなUAVベースの農業サーベイランスは、食料安全保障の監視と意思決定をサポートすることができます(SR Herwitz et al。、2020)。 農業監視の研究を進めるためには、センサー、UAV、その他の関連技術とそれらの通信およびデータ転送方法の改善が必要であるだけでなく(Ewing et al。、2019; Shuai et al。、2021)、ドローンをさまざまなものと統合することも必要ですモニタリング、農業監視、意思決定など、スマート農業に関連するさまざまなタスクを最適化するための技術は、潜在的な研究分野です(Alsamhi et al。、2020; Popescu et al。、2018; Vuran et al。、2020)。 この点で、IoT、WSN、およびビッグデータは興味深い補完機能を提供します(van der Merwe et al。、2021)。 実装コスト、コスト削減、エネルギー効率、およびデータセキュリティは、このような統合について十分に研究されていない分野のXNUMXつです(Masroor et al。、XNUMX)。
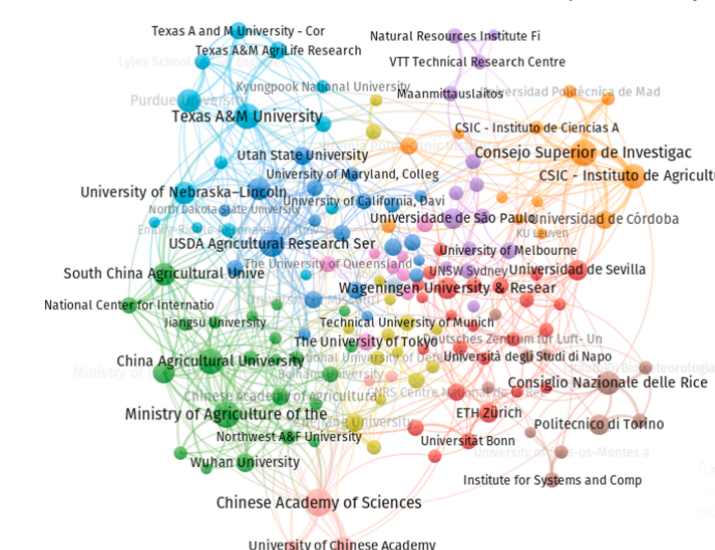
国と学術機関
最後のステップには、出身国と著者の学歴の調査が含まれていました。 この分析を通じて、農業におけるドローンの応用に貢献する学者の地理的分布をよりよく理解することを目指しています。 国や学術機関の多様性に注目することは注目に値します。 国の観点からは、米国、中国、インド、イタリアが出版物の数でリストのトップにランクされています(表7)。 現在
農業用無人機の研究は、主に精密農業への応用に高い関心を持っているため、主に北米とアジアの国々に集中しています。 たとえば、米国では、841.9年の農業用無人機の市場は2020億30万米ドルと推定され、世界市場シェアの約2021%を占めています(ReportLinker、2.6年)。 世界最大の経済国としてランク付けされている中国は、2027年におよそXNUMX億米ドルの市場規模に達すると予測されています。この国は、生産性の問題を克服し、より良い収量、労働力の軽減、およびより少ない生産投入量を達成するために農業ドローンを求めています。 しかし、中国での技術の採用は、人口規模や既存の作物管理慣行を革新および改善する必要性などの要因によっても推進されています。
貢献している上位の最も生産的な国および大学/組織
農業用無人機関連の研究。
| ランク | か国 |
| 1 | USA |
| 2 | 中国 |
| 3 | India |
| 4 | Italy |
| 5 | スペイン |
| 6 | ドイツ |
| 7 | ブラジル |
| 8 | オーストラリア |
| 9 | 日本 |
| 10 | イギリス |
| ランク | 大学/組織 |
| 1 | 中国科学院 |
| 2 | 中華人民共和国農業省 |
| 3 | Consejo優れたデ·InvestigacionesCientíficas |
| 4 | テキサスA&M大学 |
| 5 | 中国農業大学 |
| 6 | USDA農業研究サービス |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | パデュー大学 |
| 9 | 米国学術研究会議 |
| 10 | 華南農業大学 |
大学と組織の観点から、中国科学院は出版物の数の点でリストのトップであり、中華人民共和国農業省とConsejoSuperiordeInvestigacionesCientíficasがそれに続きます。 中国科学院は、著者のLiaoXiaohanとLiJunによって代表されています。 ハン・ウェンティングは中華人民共和国農業省を代表しています。 Consejo Superior deInvestigacionesCientíficasは、Lopez-Granados、´F.およびPena、〜Jos´eMaríaSによって代表されています。米国からは、テキサスA&M大学やパデュー大学などの大学が
言及。 出版物の数が最も多い大学とその関連性を図4に示します。さらに、このリストには、科学研究に積極的であるが学術機関ではないConsiglioNazionaledelleRicercheやConsejoSuperiordeInvestigacionesCientíficasなどの機関が含まれています。 。
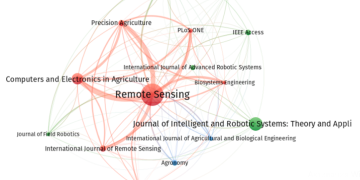
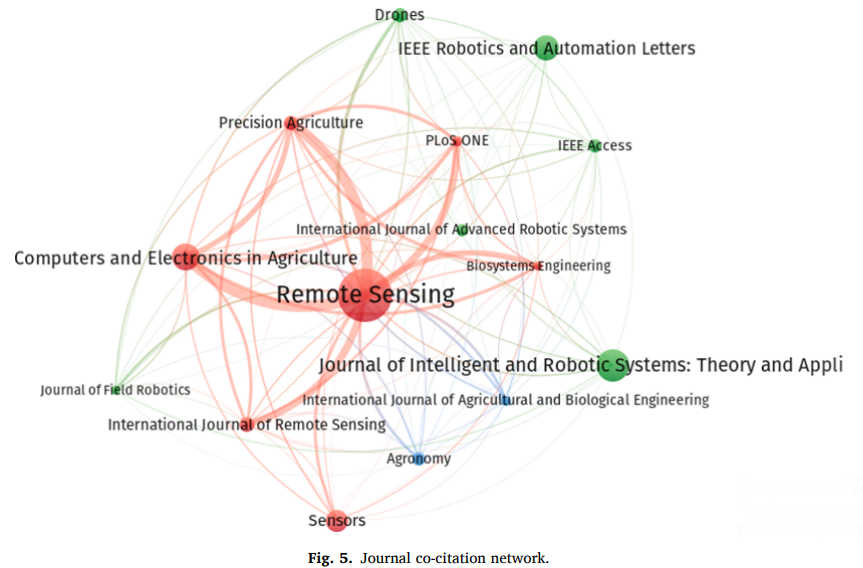
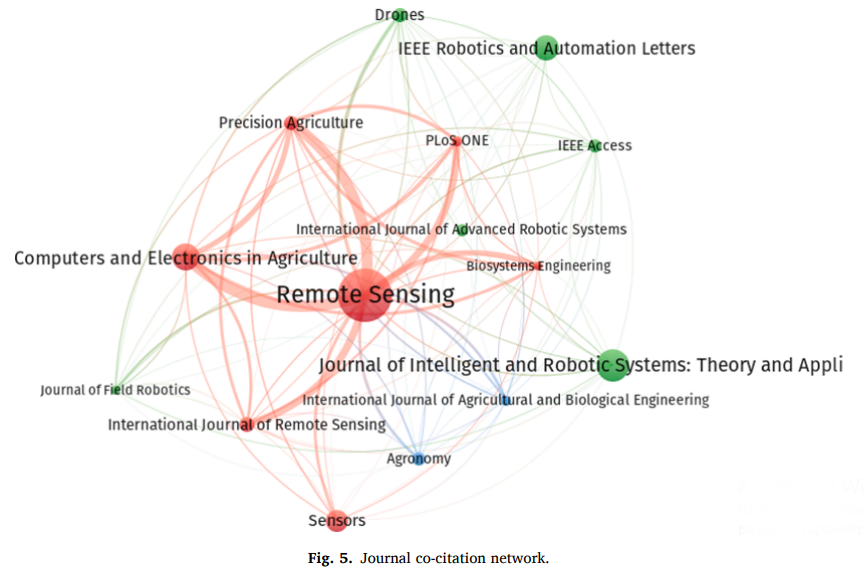
私たちの選択には、事実上すべての利用可能なデータを網羅する多種多様なジャーナルが含まれていました。 表8に示すように、258件の記事を含むリモートセンシングが最上位にランクされ、次にJournal of Intelligent and Robotic Systems:Theory and Applications with 126、Computers and Electronics in Agriculture(98件)が続きます。 リモートセンシングは主にドローンのアプリケーションと開発に焦点を当てていますが、農業におけるコンピューターと電子機器は主に農業におけるコンピューターハードウェア、ソフトウェア、電子機器、および制御システムの進歩をカバーしています。 87の出版物があるIEEERoboticsand AutomationLettersや34の出版物があるIEEEAccessなどのクロスエリアアウトレットも、この分野で最高のアウトレットです。 上位959のアウトレットは、20.40のドキュメントで文献に貢献しており、これはすべての出版物の約5%です。 ジャーナルの共引用分析により、出版物間の重要性と類似性を調べることができます。 共引用分析では、図XNUMXに示すように、XNUMXつのクラスターが生成されます。赤いクラスターは、リモートセンシング、農業におけるコンピューターと電子機器、センサーなどのジャーナルで構成されています。
およびリモートセンシングの国際ジャーナル。 これらのアウトレットはすべて、リモートセンシングと精密農業の分野で非常に評判の良いジャーナルです。 緑のクラスターには、Journal of Intelligent and Robotic Systems:Theory and Applications、IEEE Robotics and Automation Letters、IEEE Access、Dronesなどのロボット工学を扱うジャーナルが含まれています。 これらの販売店は主に自動化に関する論文を発表しており、農業技術者に役立ちます。 最終的なクラスターは、AgronomyやInternational Journal of Agricultural and Biological Engineeringなど、農学と農業工学に関連するジャーナルによって形成されます。
農業用無人機関連の研究のトップ15ジャーナル。
| ランク | ジャーナル | ワンランク上の |
| 1 | リモートセンシング | 258 |
| 2 | Journal of Intelligent and Robotic Systems: 理論と アプリケーション | 126 |
| 3 | 農業におけるコンピューターとエレクトロニクス | 98 |
| 4 | IEEE ロボティクスおよびオートメーション レター | 87 |
| 5 | センサー | 73 |
| 6 | 国際リモートセンシングジャーナル | 42 |
| 7 | 精密農業 | 41 |
| 8 | ドローン | 40 |
| 9 | 農業学 | 34 |
| 10 | IEEEアクセス | 34 |
| 11 | 高度なロボットシステムの国際ジャーナル | 31 |
| 12 | 国際農業生物工学ジャーナル | 25 |
| 13 | PLoSのONE | 25 |
| 14 | ジャーナル オブ フィールド ロボティクス | 23 |
| 15 | バイオシステム工学 | 23 |
まとめ
まとめ
この研究では、農業用無人機に関する既存の研究を要約して分析しました。 さまざまな計量書誌学的手法を応用して、農業用無人機関連の研究の知的構造をより深く理解するよう努めました。 要約すると、私たちのレビューは、文献のキーワードを特定して議論し、ドローンの分野で意味的に類似したコミュニティを形成しながら知識クラスターを明らかにし、以前の研究の概要を示し、将来の研究の方向性を提案することによって、いくつかの貢献を提供します。 以下に、農業用無人機の開発に関するレビューの主な調査結果の概要を示します。
•2012年以降の記事数の増加が示すように、過去2011年間で文献全体が急速に成長し、大きな注目を集めました。この知識分野はまだ完全に成熟していませんが(Barrientos et al。、2019; Maes &Steppe、2022)、いくつかの質問はまだ答えられていません。 たとえば、屋内農業におけるドローンの有用性については、まだ議論の余地があります(Aslan et al。、2021; Krul et al。、2015; Rold´ et al。、2019)。 フィールドシーンの複雑さとさまざまなイメージング環境(影や照明など)により、クラス内のスペクトルの分散が大きくなる可能性があります(Yao et al。、2021)。 後の研究段階でさえ、研究者は特定のシナリオと必要な画質に従って最適な飛行計画を決定するように挑戦されてきました(Soares et al。、XNUMX; Tu et al。、
2020)。
• この分野は、効率的な UAV システムの開発から、農業用ドローンの設計における機械学習や深層学習などの AI 技術の組み込みへと進歩していることに気付きます (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020)。
• 農業用ドローンに関する研究では、環境モニタリング、作物管理、雑草管理 (クラスター 1) およびリモート フェノタイピングと収量推定 (クラスター 2) における技術の可能性を調査することにより、主にリモート センシングが議論されました。 農業用ドローンに関する一連の有力な研究には、Austin (2010)、Berni et al. (2009)a、Herwitz ら。 (2004)、Nex と Remondino (2014)、Zhang と Kovacs (2012)。 これらの研究は、農業の文脈におけるドローン関連の研究の概念的基礎を開発しました。
•方法論に関連して、これまでに行われた研究のほとんどは、システム設計、概念、またはレビューベースの研究のいずれかで構成されていたことがわかりました(Inoue、2020; Nex&Remondino、2014; P´erez-Ortizetal。 、2015; Yao et al。、2019)。 また、農業用無人機の調査において、経験的、定性的、および事例研究に基づく方法が機能していないことにも気づきました。
•最近、精密農業、AI技術、精密ブドウ栽培、水ストレス評価に関連するトピックが大きな注目を集めています(Espinoza et al。、2017; Gomez-Cand´on´ et al。、2016; Matese et al。、2015; Matese&Di Gennaro、2018、2021; Z. Zhou et al。、2021)。 1990年から2010年と2011年から2021年の1990つの別々の時代の研究クラスターを注意深く調べると、ドメインの知的構造の進歩が明らかになります。 2010年からXNUMX年までの期間は、UAVの設計、開発、および実装の議論から明らかなように、ドローンの中心的な概念と概念の構築を構成していました。 第XNUMXの時代では、研究の焦点は以前の研究に拡大し、農業におけるUAVのユースケースを統合する努力をします。 また、イメージングタスクと精密農業におけるドローンのアプリケーションについて説明している多くの研究も見つかりました。
| ランク | ジャーナル | ワンランク上の |
| 1 | リモートセンシング | 258 |
| 2 | Journal of Intelligent and Robotic Systems: 理論と | 126 |
| アプリケーション | ||
| 3 | 農業におけるコンピューターとエレクトロニクス | 98 |
| 4 | IEEE ロボティクスおよびオートメーション レター | 87 |
| 5 | センサー | 73 |
| 6 | 国際リモートセンシングジャーナル | 42 |
| 7 | 精密農業 | 41 |
| 8 | ドローン | 40 |
| 9 | 農業学 | 34 |
| 10 | IEEEアクセス | 34 |
| 11 | 高度なロボットシステムの国際ジャーナル | 31 |
| 12 | 国際農業生物工学ジャーナル | 25 |
| 13 | PLoSのONE | 25 |
| 14 | ジャーナル オブ フィールド ロボティクス | 23 |
| 15 | バイオシステム工学 | 22 |
含意
私たちの計量書誌学レビューは、学者、農民、農業専門家、作物コンサルタント、UAVシステム設計者を念頭に置いて設計および実施されました。 著者の知る限り、これは、の詳細な計量書誌学的分析を行った最初のオリジナルレビューのXNUMXつです。
農業におけるドローンの用途。 出版物の引用および共引用分析を使用して、この知識体系の包括的なレビューを実施しました。 ドローン研究の知的構造を説明する私たちの試みは、学者に新しい洞察を提供します。 時間の経過とともに使用されるキーワードを注意深く検討すると、ドローン関連の文献のホットスポットと焦点となる研究領域が明らかになります。 さらに、この分野で完了した最も影響力のある研究を特定するために、最も引用された研究のリストを提示します。 その結果、記事とキーワードの特定は、将来の研究のためのいくつかの道を明らかにするための確かな出発点を提供する可能性があります。
重要なのは、比較可能な作品を分類するクラスターを明らかにし、結果を詳しく説明したことです。 クラスターに分類された研究は、UAV研究の知的構造を理解するのに役立ちます。 特に、ドローンの採用要因を調査する研究が不足していることを発見しました
農業活動における障壁(表9を参照)。 将来の研究者は、さまざまな農業活動や気候条件におけるドローンの採用要因を評価する経験的調査を実施することにより、この潜在的なギャップに対処することができます。 さらに、ドローンの有効性に関するケーススタディベースの研究は、現場からの実際のデータに裏付けられている必要があります。 また、農民や管理者を学術研究に参加させることは、ドローン研究の理論的および実践的な進歩の両方にとって有利です。 また、最も著名な研究者とその貢献を特定することができました。これは、最近の独創的な研究の認識が将来の学術的取り組みのガイダンスを提供できるため、貴重です。
テーブル9
UAV採用の障壁。
| 障壁 | 説明 |
| データセキュリティ | サイバーセキュリティは実装の大きな課題です IoTソリューション(Masroor et al。、2021)。 |
| 相互運用性と 統合 | UAV、WSN、IoTなどのさまざまなテクノロジー。 統合され、データを送信する必要があります。 複雑さのレベルを上げる(Alsamhi et al。、2021; Popescu et al。、2020; Vuran et al。、2018)。 |
| 実装コスト | これは、特に小規模農家や農家に当てはまります。 さまざまな最先端技術の統合( Masroor et al。、2021)。 |
| 労働知識と 専門知識 | UAV を操作するには、熟練したドローン パイロットが必要です。 また、様々な最先端技術を実装 技術には熟練労働者が必要です(YB Huang et al。、2013; Tsouros et al。、2019)。 |
| エンジン出力と飛行 デュレーション | ドローンは長時間の運用ができず、カバーできない 広いエリア(Hardin&Hardin、2010; Laliberte et al。、 2007)。 |
| 安定性、信頼性、および 機動性 | ドローンは悪天候時には安定しません (Hardin & Hardin, 2010; Laliberte et al., 2007)。 |
| ペイロードの制限と センサーの品質 | ドローンは限られた荷物しか運ぶことができず、 低品質のセンサーをロードする機能(Nebiker ら、2008)。 |
| 規制 | ドローンも危ないのでシビア 一部の地域の規制(Hardin&Jensen、2011年; ラリベルト & ランゴ、2011)。 |
| 農民の知識と 関心 | 他の最先端技術として、ドローンの 実装の成功には専門知識が必要であり、 不確実性を伴う(Fisher et al。、2009; Lambert et al。、2004; スタッフォード、2000)。 |
利回りを最大化するために利用可能なリソースを効率的に使用する必要性が常にあるため、農家はドローンを利用して、畑の迅速、正確、かつ費用対効果の高いスキャンを確実に行うことができます。 この技術は、農家が作物の状態を判断し、水の状態、成熟の段階、虫の侵入、栄養の必要性を評価するのに役立ちます。 ドローンのリモート センシング機能により、問題を早い段階で予測し、迅速に適切な介入を行うための重要なデータを農家に提供できます。 ただし、テクノロジーの利点は、課題に適切に対処した場合にのみ実現できます。 に照らして
データセキュリティ、センサー技術の問題(測定の信頼性や精度など)、統合の複雑さ、およびかなりの実装コストに関する現在の問題、将来の研究では、農業用無人機やその他の切断を統合することの技術的、経済的、および運用上の実現可能性も検討する必要があります。エッジテクノロジー。
制限事項
私たちの研究にはいくつかの制限があります。 まず、調査結果は、最終的な分析のために選択された出版物によって決定されます。 農業用無人機に関連するすべての関連研究、特にScopusデータベースに索引付けされていない研究をキャプチャすることは困難です。 さらに、データ収集プロセスは検索キーワードの設定に限定されており、包括的ではなく、結論が出ない可能性があります。 したがって、将来の研究では、データ収集の根本的な問題にもっと注意を払う必要があります。
より信頼できる結論。 もうXNUMXつの制限は、引用数が少ない新しい出版物に関するものです。 計量書誌学的分析は、何年にもわたってより多くの引用を受ける傾向があるため、以前の出版物に偏っています。 最近の研究では、注目を集めて引用を蓄積するために一定の時間が必要です。 その結果、パラダイムシフトをもたらす最近の研究は、影響力のある上位XNUMXの研究にランク付けされません。 この制限は、農業用無人機のような急速に出現している研究領域の調査で広く見られます。 この研究の文献を研究するためにScopusに相談したので、将来の研究者は異なることを検討する可能性があります
Web ofScienceやIEEEXploreなどのデータベースは、視野を広げ、研究構造を強化します。
潜在的な計量書誌学研究は、会議論文、章、本などの他の重要な知識源を考慮して、新しい洞察を生み出す可能性があります。 農業用無人機に関する世界的な出版物のマッピングと調査にもかかわらず、私たちの調査結果は、大学の学術的成果の背後にある理由を明らかにしませんでした。 これは、農業に関する研究に関して、一部の大学が他の大学よりも生産性が高い理由を定性的に説明することで、新しい研究分野への道を開きます。
ドローン。 さらに、将来の研究は、いくつかの研究者によって示されているように、環境モニタリング、作物管理、雑草マッピングなどのいくつかの方法で農業の持続可能性を高めるドローンの可能性についての洞察を提供する可能性があります(Chamuah&Singh、2019; Islam et al。、2021; Popescu et al。、2020; J. Su、Liu、et al。、2018b)。 選択された論文の数が多いためにテキスト分析が不可能であったため、
使用された研究方法と先行研究における農家の関与。 要するに、ドローン研究の分析により、この知識体の目に見えないつながりが明らかになりました。 したがって、このレビューは、出版物間の関係を明らかにし、研究分野の知的構造を探るのに役立ちます。 また、著者のキーワード、所属、国など、文学のさまざまな側面間のつながりも示しています。
利害関係の宣言
著者は、この論文で報告された研究に影響を与える可能性のある競合する金銭的利益や個人的な関係は知られていないことを宣言しています。
付録1
TITLE-ABS-KEY(((ドローン*または「無人航空機」またはuav*または「無人航空機システム」またはuas または「遠隔操縦航空機」)AND(農業OR農業OR農業OR農家)))AND(EXCLUDE(PUBYEAR、2022))AND(LIMIT-TO(LANGUAGE、“ English”))。
参考文献
Aasen、H.、Burkart、A.、Bolten、A.、Bareth、G.、2015.植生モニタリング用の軽量UAVスナップショットカメラを使用した3Dハイパースペクトル情報の生成:from
品質保証のためのカメラキャリブレーション。 ISPRSJ.フォトグラム。 Remote Sens。108、245–259。 https://doi.org/10.1016/j.isprsjprs.2015.08.002。
Abd-Elrahman、A.、Pearlstine、L.、Percival、F.、2005.無人航空機画像からの自動鳥検出のためのパターン認識アルゴリズムの開発。
調査。 土地に通知します。 科学65(1)、37–45。
Abdollahi、A.、Rejeb、K.、Rejeb、A.、Mostafa、MM、Zailani、S.、2021.農業におけるワイヤレスセンサーネットワーク:計量書誌学的分析からの洞察。 サステナビリティ13(21)、
12011.
Aboutalebi、M.、Torres-Rua、AF、Kustas、WP、Nieto、H.、Coopmans、C.、McKee、M。、高解像度光学画像における影検出のさまざまな方法の評価と計算における影の影響の評価NDVIの、そして蒸発散。 Irrig。 科学37(3)、407–429。 https://doi.org/10.1007/s00271-018-0613-9。
Adao、〜T.、Hruˇska、J.、Padua、´L.、Bessa、J.、Peres、E.、Morais、R.、Sousa、JJ、2017.ハイパースペクトルイメージング:UAVベースのセンサーに関するレビュー、データ処理と
農林業への応用。 リモートセンシング9(11)。 https://doi.org/10.3390/rs9111110。
AgüeraVega、F.、Ramírez、FC、Saiz、MP、Rosúa、FO、2015年。ヒマワリの収穫を監視するための無人航空機を使用した多時期イメージング。 Biosyst。 エンジニアリング
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. UAV が取得した低パーセンテージのオーバーラップ画像からの正確なデジタル標高モデルの生成。 Int。
J. Remote Sens。38(8–10)、3113–3134。 https://doi.org/10.1080/01431161.2017.1285085。
Ali、I.、Greifeneder、F.、Stamenkovic、J.、Neumann、M.、Notarnicola、C.、2015.リモートセンシングデータからバイオマスと土壌水分を取得するための機械学習アプローチのレビュー。 リモートセンシング7(12)、16398–16421。
Alsamhi、SH、Afghah、F.、Sahal、R.、Hawbani、A.、Al-qaness、MAA、Lee、B.、Guizani、M.、B5GネットワークでUAVを使用するモノのグリーンインターネット:アプリケーションのレビュー
と戦略。 広告。 ホック。 ネットワーク。 117、102505https://doi.org/10.1016/j。 adhoc.2021.102505。
Al-Thani, N.、Albuainain, A.、Alnaimi, F.、Zorba, N.、2020年。羊の家畜モニタリング用ドローン。 : 第 20 回 IEEE 地中海電気技術会議。 https://doi.
org / 10.1109/MELECON48756.2020.9140588。
Ampatzidis, Y., Partel, V., 2019. マルチスペクトル イメージングと人工知能を利用した柑橘類の UAV ベースのハイスループット表現型解析。 リモートセンシング 11 (4)、https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: 人工知能を利用した精密農業アプリケーション用に UAV が収集したデータを処理、分析、視覚化するためのクラウドベースのアプリケーション。 計算します。 電子。 農業。 174、105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang、K.-L.-M.、Seng、JKP、2021.農業におけるハイパースペクトル情報を使用したビッグデータと機械学習。 IEEE Access 9、36699〜36718。 https://doi.org/10.1109/
ACCESS.2021.3051196。
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. レビュー: 牧草地ベースの畜産システムにおける精密畜産農業技術。 動物 16 (1)、https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina、D.、Ramirez-Delreal、TA、Villanueva-Vasquez、´D.、Mejia-Aguirre、C.、高度な情報通信技術の動向
農業生産性の向上:計量書誌学的分析。 農学10(12)、第12条。https://doi.org/10.3390/agronomy10121989。
Armstrong、I.、Pirrone-Brusse、M.、Smith、A.、Jadud、M.、2011年。フライングゲーター:occam-πの空中ロボット工学に向けて。 コミュン。 プロセスアーキテクト。 2011、329〜340。 https://doi。 org / 10.3233/978-1-60750-774-1-329。
Arora、SD、Chakraborty、A.、2021.消費者の不満行動(CCB)研究の知的構造:計量書誌学的分析。 J.BusinessRes。 122、60〜74。
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
オープンフィールドと温室での精密農業のためのUAVによる最近の研究の包括的な調査。 Appl。 科学12(3)、1047。https://doi.org/10.3390/
app12031047。
Atkinson、JA、Jackson、RJ、Bentley、AR、Ober、E。、&Wells、DM(2018)。 将来のためのフィールド表現型。 オンラインの年次植物レビュー(pp。719–736)。 ジョン
Wiley&Sons、Ltd. doi:10.1002/9781119312994.apr0651。
Austin, R., 2010. 無人航空機システム: UAVS の設計、開発、展開。 In: 無人航空機システム: UAVS の設計、開発、および
展開。 ジョンワイリーアンドサンズ。 https://doi.org/10.1002/9780470664797。
Awais、M.、Li、W.、Cheema、MJM、Zaman、QU、Shaheen、A.、Aslam、B.、Zhu、W.、Ajmal、M.、Faheem、M.、Hussain、S.、Nadeem、 AA、Afzal、MM、Liu、C.、2022年。植物ストレスにおけるUAVベースのリモートセンシングは、デジタル農業の実践に高解像度の熱センサーを使用することを想像しています:メタレビュー。 Int。 J.エンバイロン。 科学技術。 https://doi。
org/10.1007/s13762-021-03801-5.
Bacco、M.、Berton、A.、Ferro、E.、Gennaro、C.、Gotta、A.、Matteoli、S.、Paonessa、F.、Ruggeri、M.、Virone、G.、Zanella、A.、 2018.スマート農業:機会、課題
とテクノロジーイネーブラー。 2018IoT垂直および。 農業に関するトピックサミット-トスカーナ(IOTトスカーナ)1–6。 https://doi.org/10.1109/IOTTUSCANY.2018.8373043。
Bah、MD、Hafiane、A.、Canals、R.、2018.UAV画像のラインクロップでの雑草検出のための教師なしデータラベリングによる深層学習。 リモートセンシング10(11)、1690。
https://doi.org/10.3390/rs10111690.
Baldi、S.、1998.引用の割り当てにおける規範的プロセスと社会的構成主義的プロセス:ネットワーク分析モデル。 午前。 ソシオール。 改訂63(6)、829–846。 https://doi。
org / 10.2307 / 2657504。
Baluja, J.、Diago, MP、Balda, P.、Zorer, R.、Meggio, F.、Morales, F.、Tardaguila, J.、2012. 熱およびマルチスペクトルによるブドウ園の水の状態の変動性の評価
無人航空機(UAV)を使用した画像。 Irrig。 科学30(6)、511–522。 https://doi.org/10.1007/s00271-012-0382-9。
Barabaschi、D.、Tondelli、A.、Desiderio、F.、Volante、A.、Vaccino、P.、Val`e、G.、Cattivelli、L.、次世代育種。 植物科学242、3–13。 https://doi.org/10.1016/j。
Plantsci.2015.07.010。
Barbedo、JGA、Koenigkan、LV、2018年。牛を監視するための無人航空機システムの使用に関する展望。 OutlookAgric。 47(3)、214–222。 https://doi.org/10.1177/0030727018781876。
Bareth、G.、Aasen、H.、Bendig、J.、Gnyp、ML、Bolten、A.、Jung、A.、Michels、R.、Soukkamaki、¨J。、2015.軽量でUAVベースのハイパースペクトルフルフレームカメラ
作物を監視するため:携帯型分光放射計測定とのスペクトル比較。 写真測量、Fernerkundung、Geoinformation 2015(1)、69–79。
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A.、Colorado, J.、del Cerro, J.、Martinez, A.、Rossi, C.、Sanz, D.、Valente, J.、農業における空中リモート センシング: エリア カバレッジへの実用的なアプローチ
ミニ空中ロボットの艦隊の経路計画。 J.フィールドロブ。 28(5)、667–689。 https://doi.org/10.1002/rob.20403。
Basiri、A.、Mariani、V.、Silano、G.、Aatif、M.、Iannelli、L.、Glielmo、L.、2022.マルチローターUAVの正確な経路計画アルゴリズムの適用に関する調査
農業。 J.ナビグ75(2)、364–383。
Basnet、B.、Bang、J.、2018年。知識集約型農業の最先端:応用センシングシステムとデータ分析に関するレビュー。 J. Sens。2018、1–13。
Bendig、J.、Bolten、A.、Bareth、G.、2013年。作物の成長変動を監視するための多時期の非常に高解像度の作物表面モデルのためのUAVベースのイメージング。 Photogrammetrie、Fernerkundung、Geoinformation 2013(6)、551–562。 https://doi。 org / 10.1127 / 1432-8364/2013/0200。
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. UAV ベースの RGB イメージングから派生した作物表面モデル (CSM) を使用したオオムギのバイオマスの推定。 リモートセンシング 6 (11)、10395–10412。
Bendig、J.、Yu、K.、Aasen、H.、Bolten、A.、Bennertz、S.、Broscheit、J.、Gnyp、ML、Bareth、G.、2015.作物表面からのUAVベースの草丈の組み合わせモデル、
オオムギのバイオマス監視のための可視および近赤外植生指数。 Int。 J.Appl. 地球観測。 Geoinf。 39、79–87。 https://doi.org/10.1016/j.jag.2015.02.012.
Berni、JA、Zarco-Tejada、PJ、Sepulcre-Canto、´G.、Fereres、E.、Villalobos、F.、2009a。 高解像度を使用したオリーブ果樹園の林冠コンダクタンスとCWSIのマッピング
熱リモートセンシング画像。 リモートセンセーションエンバイロン。 113(11)、2380〜2388。 https://doi.org/10.1016/j.rse.2009.06.018。
Berni、JA、Zarco-Tejada、PJ、Suarez、´L.、Fereres、E.、2009b。 無人航空機からの植生モニタリングのための熱および狭帯域マルチスペクトルリモートセンシング。 IEEETrans。 Geosci。 Remote Sens。47(3)、722–738。
Bouzembrak、Y.、Klüche、M。、Gavai、A.、Marvin、HJP、2019.食品安全におけるモノのインターネット:文献レビューと計量書誌学的分析。 トレンド食品科学。 技術。 94,54–64。 https://doi.org/10.1016/j.tifs.2019.11.002。
Brewster、C.、Roussaki、I.、Kalatzis、N.、Doolin、K.、Ellis、K.、2017.農業におけるIoT:ヨーロッパ全体の大規模パイロットの設計。 IEEECommun。 マグ。 55(9)、26–33。
バターズ、TM、ベルトン、D。、クロス、AT、2019年。ミリメートル精度での個々の実生と実生群集のマルチセンサーUAV追跡。 ドローン3(4)、81。
https://doi.org/10.3390/drones3040081.
Candiago、S.、Remondino、F.、De Giglio、M.、Dubbini、M.、Gattelli、M.、2015.UAV画像からの精密農業アプリケーションのマルチスペクトル画像と植生指数の評価。 リモートセンシング7(4)、4026〜4047。 https://doi.org/10.3390/rs70404026。
Cao、Y.、Li、GL、Luo、YK、Pan、Q.、Zhang、SY、2020. UAVから導出されたワイドダイナミックレンジ植生指数(WDRVI)を使用したテンサイ成長指標のモニタリング
マルチスペクトル画像。 計算します。 電子。 農業。 171、105331https://doi.org/10.1016/j.compag.2020.105331。
カシージャス、J。、アセド、F.、2007年。家業文学の知的構造の進化:FBRの計量書誌学的研究。 ファミリービジネスRev.20(2)、141–162。
Cen、H.、Wan、L.、Zhu、J.、Li、Y.、Li、X.、Zhu、Y.、Weng、H.、Wu、W.、Yin、W.、Xu、C.、 Bao、Y.、Feng、L.、Shou、J.、He、Y.、2019.下の米のバイオマスの動的モニタリング
デュアルイメージフレームスナップショットカメラを備えた軽量UAVを使用したさまざまな窒素処理。 Plant Methods 15(1)、32. https://doi.org/10.1186/s13007-019-
0418-8。
Chamuah、A.、Singh、R.、2019.民間UAVによるインド農業の持続可能性の確保:責任あるイノベーションの視点。 SNAppl。 科学2(1)、106。https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah、A.、Singh、R.、2022.インドの作物保険アプリケーションのための民間無人航空機(UAV)イノベーションの責任あるガバナンス。 J.責任
技術。 9、100025https://doi.org/10.1016/j.jrt.2022.100025。
Chen、A.、Orlov-Levin、V.、Meron、M.、2019.作物の林冠の高解像度可視チャネル航空画像を精密灌漑管理に適用します。 アグリック。 水
マナグ。 216、196〜205。 https://doi.org/10.1016/j.agwat.2019.02.017。
Daakir、M.、Pierrot-Deseilligny、M.、Bosser、P.、Pichard、F.、Thom、C.、Rabot、Y.、Martin、O.、2017.オンボード写真測量と単一周波数GPS測位を備えた軽量UAV計測アプリケーション用。 ISPRSJ.フォトグラム。 Remote Sens。127、115–126。 https://doi.org/10.1016/j.isprsjprs.2016.12.007。
Dawaliby、S.、Aberkane、A.、Bradai、A.、2020.自律型ドローン運用管理のためのブロックチェーンベースのIoTプラットフォーム。 で:第2回ACMの議事録
5G以降のドローン支援ワイヤレス通信に関するMobiComワークショップ、31〜36ページ。 https://doi.org/10.1145/3414045.3415939。
Day、RA、Gastel、B.、1998年。科学論文の書き方と出版方法。 ケンブリッジ大学出版局。 de Castro、AI、Pena、〜JM、Torres-Sanchez、´J.、Jim´enez-Brenes、FM、ValenciaGredilla、F.、Recasens、J.、Lopez-Granados、´F.、2020。自動決定木で作物を覆います-精密ブドウ栽培のためのOBIA手順とUAV画像。 リモートセンシング12(1)、56。https://doi.org/10.3390/rs12010056。
de Castro、AI、Torres-S´ anchez、J.、Pena、〜JM、Jim´enez-Brenes、FM、Csillik、O.、Lopez-´Granados、F.、2018年。自動ランダムフォレスト-OBIAアルゴリズムUAV画像を使用した作物列間および作物列内の初期の雑草マッピング。 リモートセンシング10(2)。 https://doi.org/10.3390/rs10020285。
Demir、N.、Sonmez、¨NK、Akar、T.、Ünal、S。、2018.UAV画像から派生したDSMを使用した小麦遺伝子型の草丈の自動測定。 Proceedings 2(7)、350。https://doi.org/10.3390/ecrs-2-05163。
Deng、J.、Zhong、Z.、Huang、H.、Lan、Y.、Han、Y.、Zhang、Y.、2020.無人航空機を使用したリアルタイムの雑草マッピングのための軽量セマンティックセグメンテーションネットワーク。 Appl。 科学10(20)、7132。https://doi.org/10.3390/app10207132。
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. 精密農業のための UAV ベースのマルチスペクトル リモート センシング: 異なるカメラ間の比較。 ISPRS J. フォトグラム。 リモートセン 146、124–136。
Diaz-Gonzalez、FA、Vuelvas、J.、Correa、CA、Vallejo、VE、Patino、D.、2022.土壌指標の推定に適用される機械学習とリモートセンシング技術–レビュー。 Ecol。 Ind。135、108517https://doi.org/10.1016/j.ecolind.2021.108517。
Díaz-Varela、RA、De la Rosa、R.、Leon、´L.、Zarco-Tejada、PJ、2015年。3D写真を使用してオリーブの木の樹冠パラメータを評価するための高解像度の空中UAV画像
再構築:繁殖試験への応用。 リモートセンシング 7 (4)、4213–4232。 https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Airport capacity management: a review and bibliometric analysis. J.Air Transp. 管理します。 91、102010。
Dong、T.、Shang、J.、Liu、J.、Qian、B.、Jing、Q.、Ma、B.、Huffman、T.、Geng、X.、Sow、A.、Shi、Y.、 Canisius、F.、Jiao、X.、Kovacs、JM、Walters、D.、Cable、J.、Wilson、J.、2019。
RapidEye 画像を使用して、カナダのオンタリオ州における作物の成長と収量の圃場内変動を特定します。 精密農業。 20 (6)、1231–1250。 https://doi.org/10.1007/
s11119-019-09646-w。
Dutta、PK、Mitra、S.、2021.COVID-19後の食品サプライチェーンを理解するための農業用無人機とIoTの適用。 で:Choudhury、A.、Biswas、A.、Prateek、M.、
Chakrabarti、A.(編)、農業情報学:IoTと機械学習を使用した自動化。 Wiley、pp。67–87。 van Eck、N.、Waltman、L.、2009年。ソフトウェア調査:VOSviewer、計量書誌学的マッピング用のコンピュータープログラム。 科学計量学84(2)、523–538。 https://doi.org/10.1007/s11192-009-0146-3。
Elijah、O.、Rahman、TA、Orikumhi、I.、Leow、CY、Hindia、MN、2018.モノのインターネット(IoT)と農業におけるデータ分析の概要:メリットと課題。
IEEE Internet Things J. 5(5)、3758–3773。
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019. UAVとフィールド
トマト品種の測定。 計算します。 電子。 アグリック。 158、278–283。 https://doi.org/10.1016/j.compag.2019.02.011。
Espinoza、CZ、Khot、LR、Sankaran、S.、Jacoby、PW、2017年。高解像度マルチスペクトルおよび熱リモートセンシングベースの水ストレス評価
地下灌漑ブドウ。 リモートセンシング9(9)、961。https://doi.org/10.3390/rs9090961。
Ewing、J.、Oommen、T.、Jayakumar、P.、Alger、R.、2020.土壌のグラデーションにハイパースペクトルリモートセンシングを利用する。 リモートセンシング12(20)、3312。ttps://doi.org/10.3390/
rs12203312。
Fawcett、D.、Panigada、C.、Tagliabue、G.、Boschetti、M.、Celesti、M.、Evdokimov、A.、Biriukova、K.、Colombo、R.、Miglietta、F.、Rascher、U.、アンダーソン、K.、2020年。運用条件におけるドローンベースのマルチスペクトル表面反射率と植生指数のマルチスケール評価。 リモートセンシング12(3)、514。
Feng、X.、Yan、F.、Liu、X.、2019.精密農業のためのモノのインターネット上の無線通信技術の研究。 ワイヤレス担当者。 コミュン。 108(3)、
1785-1802。
フェレイラ、MP、ピント、CF、セラ、FR、2014年。国際ビジネス研究における取引コスト理論:98年にわたる計量書誌学研究。 Scientometrics 3(1899)、1922–10.1007。 https://doi.org/11192/s013-1172-8-XNUMX。
フィッシャー、P。、アブザール、M。、ラブ、M。、ベスト、F。、チャンドラ、S.、2009年。オーストラリア南東部における精密農業の進歩。 I.シミュレートする回帰方法
農家の過去のパドック収量と正規化植生指数を使用した穀物収量の空間的変動。 作物牧草科学。 60(9)、844–858。
Floreano、D.、Wood、RJ、2015年。科学、技術、そして小型自律型ドローンの未来。 Nature 521(7553)、460–466。 https://doi.org/10.1038/nature14542。
Friha、O.、Ferrag、MA、Shu、L.、Maglaras、LA、Wang、X.、2021.スマート農業の未来のためのモノのインターネット:新興技術の包括的な調査。 IEEE CAAJ.Autom。 Sinica 8(4)、718–752。
Fuentes-Pacheco、J.、Torres-Olivares、J.、Roman-Rangel、E.、Cervantes、S.、JuarezLopez、P.、Hermosillo-Valadez、J.、Rendon-Mancha、´JM、2019.図植物のセグメンテーション深い畳み込みエンコーダー-デコーダーネットワークを使用して空中画像から。 リモートセンシング11(10)、1157。https://doi.org/10.3390/rs11101157。
Gago、J.、Douthe、C.、Coopman、RE、Gallego、PP、Ribas-Carbo、M.、Flexas、J.、Escalona、J.、Medrano、H.、2015.UAVは水ストレスを評価するために挑戦します
持続可能な農業。 アグリック。 水管理。 153、9–19。 https://doi.org/10.1016/j。 agwat.2015.01.020。
García-Tejero、IF、Rubio、AE、Vinuela、〜I.、Hern´ andez、A.、Guti´errez-Gordillo、S.、Rodríguez-Pleguezuelo、CR、Dur´ an-Zuazo、VH、2018年。熱画像工場で
不足灌漑戦略の下でアーモンドの木(cv。グアラ)の作物の水の状態を評価するためのレベル。 アグリック。 水管理。 208、176〜186。 https://doi.org/10.1016/j。
agwat.2018.06.002。
Garzonio、R.、Di Mauro、B.、Colombo、R.、Cogliati、S.、2017.小さなハイパースペクトルUASを使用した表面反射率および太陽誘起蛍光分光測定。 リモートセンシング9(5)、472。https://doi.org/10.3390/rs9050472。 Gaˇsparovi´c、M.、Zrinjski、M.、Barkovi´c、Đ。、Radoˇcaj、D.、2020.
UAV画像に基づくオート麦畑の雑草マッピング。 計算します。 電子。 アグリック。
Gebbers、R.、Adamchuk、VI、2010年。精密農業と食料安全保障。 Science 327(5967)、828–831。 https://doi.org/10.1126/science.1183899XNUMX。
Geipel, J., Link, J., Claupein, W., 2014. 無人航空機システムで取得した航空画像と作物表面モデルに基づくトウモロコシ収量のスペクトルおよび空間モデリングの組み合わせ。 リモートセンシング 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335。
Geng、D.、Feng、Y.、Zhu、Q.、2020.ユーザーのための持続可能なデザイン:文献レビューと計量書誌学的分析。 環境。 科学汚染。 解像度27(24)、29824–29836。 https://doi。 org / 10.1007/s11356-020-09283-1。
Gevaert、CM、Suomalainen、J.、Tang、J.、Kooistra、L.、2015年。マルチスペクトル衛星とハイパースペクトルを組み合わせたスペクトル時間応答曲面の生成
精密農業用途向けの UAV 画像。 IEEE J.Sel. 上。 アプリケーション地球観測。 リモートセン. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill、SS、Chana、I.、Buyya、R.、2017年。クラウドおよびビッグデータサービスとしてのIoTベースの農業:デジタルインドの始まり。 J.Org。 およびエンドユーザー計算。 (JOEUC)29(4)、
1-23。
Gmür、M.、2006年。共引用分析と目に見えない大学の検索:方法論的評価。 科学計量学57(1)、27–57。 https://doi.org/10.1023/
a:1023619503005。
Gnadinger、¨F.、Schmidhalter、U.、2017年。無人航空機(UAV)によるトウモロコシ植物のデジタルカウント。 リモートセンシング9(6)。 Https://doi.org/10.3390/rs9060544。
Gokto¨ǧan、AH、Sukkarieh、S.、Bryson、M.、Randle、J.、Lupton、T.、Hung、C.、2010年。水生雑草監視用の回転翼無人航空機と
管理。 J.Intell。 RoboticSyst.:理論。 Appl。 57(1–4)、467–484。 https://doi。 org / 10.1007/s10846-009-9371-5。
Gomez-Cand´on、´D.、De Castro、AI、Lopez-Granados、´F.、2014年。小麦の精密農業を目的とした無人航空機(UAV)画像からのモザイクの精度の評価。 精度。 アグリック。 15(1)、44–56。 https://doi.org/10.1007/s11119-013-9335-4。
Gomez-Cand´on、´D.、Virlet、N.、Labb´e、S.、Jolivot、A.、Regnard、J.-L.、2016年。UAV感知画像による樹木規模での水ストレスのフィールド表現型:の新しい洞察
熱取得と校正。 精度。 アグリック。 17(6)、786–800。 https://doi.org/10.1007/s11119-016-9449-6。
Gonzalez-Dugo、V.、Zarco-Tejada、PJ、Fereres、E.、2014.柑橘類果樹園の水不足の指標として作物の水ストレス指数を使用することの適用性と限界。 アグリック。 為に。 メテオロール。 198–199、94–104。 https://doi.org/10.1016/j。 agrformet.2014.08.003。
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. 高解像度 UAV 熱画像を使用して
商業果樹園内の14つの果樹種の水状態の変動性を評価します。 精度。 アグリック。 6(660)、678–10.1007。 https://doi.org/11119/s013-9322-9-XNUMX。
Goyal、K.、Kumar、S.、2021.金融リテラシー:系統的レビューと計量書誌学的分析。 Int。 J.消費者研究45(1)、80–105。 https://doi.org/10.1111/
ijcs.12605。
グレンツドルフファー、¨GJ、エンゲル、A。、テイヘルト、B.、2008年。林業および農業における低コストのUAVの写真測量の可能性。 写真測量、リモートセンシング、および空間情報科学の国際アーカイブ– ISPRSアーカイブ37、1207〜1213。 https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerID=40&md5=b4b2d639257e8ddb5a373d15959c4e1e。
Guan、S.、Fukami、K.、Matsunaka、H.、Okami、M.、Tanaka、R.、Nakano、H.、Sakai、T.、Nakano、K.、Ohdan、H.、Takahashi、K.、 2019.高解像度の相関関係の評価
肥料の適用レベルと小さなUAVを使用した米と小麦の収穫量を含むNDVI。 リモートセンシング11(2)、112。
Gundolf、K.、Filser、M.、2013.経営研究と宗教:引用分析。 J.バス。 倫理112(1)、177–185。
Guo、Q.、Zhu、Y.、Tang、Y.、Hou、C.、He、Y.、Zhuang、J.、Zheng、Y.、Luo、S.、2020.CFDシミュレーションと空間の実験的検証およびの時間的分布
ホバー中のクワッドローター農業用UAVのダウンウォッシュ気流。 計算します。 電子。 アグリック。 172、105343https://doi.org/10.1016/j.compag.2020.105343。
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. 、ポーランド、J.、2016年。
大規模なコムギ育種苗床のハイスループット表現型への無人航空機システムの適用。 植物法12(1)。 https://doi.org/10.1186/s13007-
016-0134-6。
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. さまざまな照明条件下での UAV からのスペクトル イメージング. In GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, pp. 189–194). 国際写真測量学会とリモート センシング。 https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton、SM、Morris、RH、Carvalho、RC、Roder、N.、Barlow、P.、Mills、K.、Wang、L。無人航空機から島の植生をマッピングするための手法の評価
車両 (UAV) 画像: ピクセル分類、視覚的解釈、および機械学習アプローチ。 内外J.Appl. 地球観測。 Geoinf。 89、102085 https://doi.org/
10.1016/j.jag.2020.102085。
Haque、A.、Islam、N.、Samrat、NH、Dey、S.、Ray、B.、2021.バングラデシュにおける責任あるリーダーシップによるスマート農業:可能性、機会、そしてその先。
持続可能性13(8)、4511。
ハーディン、PJ、ハーディン、TJ、2010年。環境研究における小規模の遠隔操縦車両。 地理コンパス4(9)、1297–1311。 ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x。
ハーディン、PJ、ジェンセン、RR、2011年。環境リモートセンシングにおける小規模無人航空機:課題と機会。 GISci。 Remote Sens。48(1)、99–111。 https://doi.org/10.2747/1548-1603.48.1.99。
He、Y.、Nie、P.、Zhang、Q.、Liu、F.、2021. Agricultural Internet of Things:Technologies and Applications、(1st ed。2021edition)。 スプリンガー。
Herwitz、SR、Johnson、LF、Dunagan、SE、Higgins、RG、Sullivan、DV、Zheng、J.、Lobitz、BM、Leung、JG、Gallmeyer、BA、Aoyagi、M.、Slye、RE、Brass、JA、 2004年。
無人航空機からのイメージング:農業監視と意思決定支援。 計算します。 電子。 アグリック。 44(1)、49–61。 https://doi.org/10.1016/j。
compag.2004.02.006。
Holman、FH、Riche、AB、Michalski、A.、Castle、M.、Wooster、MJ、Hawkesford、MJ、UAV ベースのリモートセンシングを使用したフィールド プロット試験における小麦の高さと成長率のハイスループット フィールド フェノタイピング。 リモートセンシング 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara、E.、Saari、H.、Kaivosoja、J.、Pol¨onen、¨I。、Hakala、T.、Litkey、P.、M¨akynen、J。、Pesonen、L.、2013.処理と評価精密農業用の軽量UAVスペクトルカメラを使用して収集された分光画像の画像。 リモートセンシング5(10)、5006〜5039。 https://doi.org/10.3390/rs5105006。
Hossein Motlagh、N.、Taleb、T.、Arouk、O.、2016年。低高度の無人航空機ベースのモノのインターネットサービス:包括的な調査と将来の展望。 IEEE Internet Things J. 3(6)、899–922。 https://doi.org/10.1109/JIOT.2016.2612119。
Hrabar、S.、Sukhatme、GS、Corke、P.、Usher、K.、Roberts、J.、2005.UAV用の都市キャニオンのオプティカルフローとステレオベースのナビゲーションの組み合わせ。 で:2005 IEEE / RSJ
インテリジェント ロボットとシステムに関する国際会議、pp. 3309–3316。 https://doi.org/10.1109/IROS.2005.1544998.
Hsu、T.-C.、Yang、H.、Chung、Y.-C.、Hsu、C.-H.、2020.クラウドフォグコンピューティングのためのクリエイティブなIoT農業プラットフォーム。 保つ。 計算します。 Inf。 システム。 28、100285。
Huang、H.、Deng、J.、Lan、Y.、Yang、A.、Deng、X.、Zhang、L.、Gonzalez-Andujar、JL、2018.無人航空機の雑草マッピングのための完全畳み込みネットワーク( UAV)画像。 PLoS ONE 13(4)、e0196302。
Huang、H.、Lan、Y.、Yang、A.、Zhang、Y.、Wen、S.、Deng、J.、2020. UAV画像の雑草マッピングにおけるディープラーニングとオブジェクトベースの画像分析(OBIA)。 Int。 J。
リモートセン. 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. 作物モニタリングにおける UAV 画像のディープ カラー キャリブレーション
ローカルからグローバルへの注意を伴うセマンティックスタイル転送の使用。 Int。 J.Appl。 EarthObs。 Geoinf。 104、102590https://doi.org/10.1016/j.jag.2021.102590。
Huang、YB、Thomson、SJ、Hoffmann、WC、Lan、YB、Fritz、BK、2013年。農業生産のための無人航空機技術の開発と展望
管理。 Int。 J.Agric. 生物。 英文6 (3)、1–10。 https://doi.org/10.3965/j. ijabe.20130603.001.
Huang、Y.、Hoffmann、WC、Lan、Y.、Wu、W.、Fritz、BK、2009年。無人航空機プラットフォーム用のスプレーシステムの開発。 Appl。 エンジニアリングアグリック。 25(6)、803〜809。
Hunt Jr.、ER、Dean Hively、W.、Fujikawa、SJ、Linden、DS、Daughtry、CST、McCarty、GW、2010年。NIR-緑-青のデジタル写真の取得
作物監視用の無人航空機。 リモートセンシング 2 (1)、290–305。 https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. スマート農業のための作物と土壌の衛星およびドローン ベースのリモート センシング - レビュー。 土壌科学植物栄養剤。 66(6)、798–810。 https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. モノのインターネット (IoT) および
無人航空機(UAV)ベースの持続可能なスマート農業。 Sustainability 13(4)、1821。https://doi.org/10.3390/su13041821。
Jaud、M.、Passot、S.、Le Bivic、R.、Delacourt、C.、Grandjean、P.、Le Dantec、N.、2016.によって計算された高解像度デジタル表面モデルの精度の評価
最適ではない調査条件でのPhotoScan®およびMicMac®。 リモートセンシング8(6)、https://doi.org/10.3390/rs8060465。
Jim´enez-Brenes、FM、Lopez-Granados、´F.、Castro、AI、Torres-S´ anchez、J.、Serrano、N.、Pena、〜JM、2017年。 UAVベースの3Dモデリングを使用したキャノピーの成長。 植物法13(1)。 https://doi.org/10.1186/s13007-017-0205-3。
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. 非常に低い高度の UAV 画像からの出芽時の小麦作物の植物密度の推定。 リモートセンス。
環境。 198、105–114。 https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo、C.、Xiangliang、C.、Han-Chi、F.、Lam、A.、2019.クラウドコンピューティングによってサポートされる農産物監視システム。 クラスター計算。 22(4)、8929–8938。
Ju、C。、&Son、HI2018a。 農業におけるリモートセンシングのための複数のUAVシステムの性能評価。 オーストラリアのブリスベンで開催されたIEEEInternationalConference on Robotics and Automation(ICRA)での農業におけるロボットビジョンとアクションに関するワークショップの議事録、21–26。
Ju、C.、Son、HI、2018b。 農業用途向けの複数のUAVシステム:制御、実装、および評価。 Electronics 7(9)、162。https://doi.org/10.3390/
electronics7090162。
Jung、J.、Maeda、M.、Chang、A.、Bhandari、M.、Ashapure、A.、Landivar-Bowles、J.、2021.リモートセンシングと人工知能の可能性を改善するツールとして
農業生産システムの回復力。 Curr。 意見。 バイオテクノロジー。 70、15〜22。 https://doi.org/10.1016/j.copbio.2020.09.003。
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. 、2019年。無人航空機支援マルチスペクトル作物イメージングをスイカのグミ茎枯れ病の従来の偵察手法に組み込んだ改良された作物偵察技術。 プラントディス。 103 (7)、1642–1650。
Kapoor、KK、Tamilmani、K.、Rana、NP、Patil、P.、Dwivedi、YK、Nerur、S.、2018.ソーシャルメディア研究の進歩:過去、現在、未来。 知らせる。 システム。 フロント。 20
(3)、531-558。
Kerkech、M.、Hafiane、A.、Canals、R.、2020. VddNet:マルチスペクトル画像と深度マップに基づくブドウ病検出ネットワーク。 リモートセンシング12(20)、3305。https://doi。 org / 10.3390/rs12203305。
Khaliq、A.、Comba、L.、Biglia、A.、Ricauda Aimonino、D.、Chiaberge、M.、Gay、P.、2019.ブドウ園の衛星画像とUAVベースのマルチスペクトル画像の比較
変動性評価。 リモートセンシング 11 (4). https://doi.org/10.3390/rs11040436.
Khan、PW、Byun、Y.-C.、Park、N.、2020. IoTブロックチェーンにより、高度なディープラーニングを使用して食品業界4.0向けに最適化された来歴システムが可能になりました。 センサー20(10)、2990。
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. 植物病害の画像ベースの検出: 古典的な機械学習からディープ ラーニングの旅へ. 無線通信。 モバイル コンピューティング。 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. UAV ベースの作物/雑草分類のための新しい半教師付きフレームワーク。 PLoS ONE 16 (5)、e0251008。
Khanal、S.、Fulton、J.、Shearer、S.、2017.精密農業における熱リモートセンシングの現在および潜在的なアプリケーションの概要。 計算します。 電子。
アグリック。 139、22–32。 https://doi.org/10.1016/j.compag.2017.05.001。
Khanna、A.、Kaur、S.、2019年。モノのインターネット(IoT)の進化と、精密農業の分野におけるその重要な影響。 計算します。 電子。 アグリック。 157、218〜231。
Kim、W.、Khan、GF、Wood、J.、Mahmood、MT、2016年。持続可能な組織のための従業員の関与:ソーシャルネットワーク分析とバーストを使用したキーワード分析
検出アプローチ。 サステナビリティ8(7)、631。
Kirsch、M.、Lorenz、S.、Zimmermann、R.、Tusa、L.、Mockel、¨R。、Hodl、¨P。、Booysen、R.、Khodadadzadeh、M.、Gloaguen、R.、2018.統合地上およびドローン搭載の
探査マッピングおよび採掘モニタリングのためのハイパースペクトルおよび写真測量センシング方法。 リモートセンシング 10 (9), 1366. https://doi.org/10.3390/
rs10091366。
北野、BT、メンデス、CCT、ゲウス、AR、オリベイラ、HC、ソウザ、JR、2019年。ディープラーニングとUAV画像を使用したトウモロコシ植物のカウント。 IEEEGeosci。 RemoteSens。Lett。 1〜5https://doi.org/10.1109/LGRS.2019.2930549。
Koh、JCO、Spangenberg、G.、Kant、S.、2021年。ハイスループット画像ベースの植物表現型のための自動機械学習。 リモートセンシング13(5)、858。https://
doi.org/10.3390/rs13050858。
Kovalev、IV、Voroshilova、AA、2020年。貨物 UAV のエコシステムの開発における最新の技術動向。 J.Phys。 会議サー。 1515(5)、052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul、S.、Pantos、C.、Frangulea、M.、Valente、J.、2021.単眼カメラを備えた小型ドローンを使用した屋内家畜および農業用のビジュアルSLAM:実現可能性調査。
ドローン5(2)、41。https://doi.org/10.3390/drones5020041。
Kulbacki、M.、Segen、J.、Knie´c、W.、Klempous、R.、Kluwak、K.、Nikodem、J.、Kulbacka、J.、Serester、A.、2018.農業自動化のためのドローンの調査植栽から
収穫。 中: INES 2018 – インテリジェント エンジニアリング システムに関する IEEE 第 22 回国際会議、pp. 000353–358。 https://doi.org/10.1109/INES.2018.8523943.
Lagkas、T.、Argyriou、V.、Bibi、S.、Sarigiannidis、P.、2018. UAV IoTフレームワークの見解と課題:ドローンを「モノ」として保護することに向けて。 センサー18(11)、4015。https://doi.org/10.3390/s18114015。
Laliberte、AS、Rango、A.、2011年。乾燥した無人航空機で取得されたサブデシメートル画像の分析のための画像処理および分類手順。
放牧地。 GISci。 リモートセンス 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4。
Laliberte、AS、Rango、A.、Herrick、JE、2007年。放牧地のマッピングと監視のための無人航空機:XNUMXつのシステムの比較。 ASPRS年次会議議事録。
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021.原生草原における雑草マッピングのためのオープンソース ワークフロー
無人航空機の使用:ケーススタディとしてRumexobtusifoliusを使用します。 ユーロ。 J.Remote Sens。54(sup1)、71–88。 https://doi.org/10.1080/22797254.2020.1793687。
Lambert、DM、Lowenberg-DeBoer、J.、Griffin、TW、Peone、J.、Payne、T.、Daberkow、SG、2004.採用、収益性、および精密農業データのより有効な活用。
ワーキングペーパー。 パデュー大学。 https://doi.org/10.22004/ag.econ.28615。
Lelong、CCD、Burger、P.、Jubelin、G.、Roux、B.、Labb´e、S.、Baret、F.、2008年。小さな区画での小麦作物の定量的モニタリングのための無人航空機画像の評価。 センサー8(5)、3557–3585。 https://doi.org/10.3390/s8053557。
Li、C.、Niu、B.、2020.ビッグデータとモノのインターネットに基づくスマート農業の設計。 Int。 J.ディストリビューション。 Netw上院議員。 16(5)ttps://doi.org/10.1177/1550147720917065。
Li、W.、Niu、Z.、Chen、H.、Li、D.、Wu、M.、Zhao、W.、2016.からの高解像度ステレオ画像を使用したトウモロコシの林冠高と地上バイオマスの遠隔推定低コストの無人航空機システム。 Ecol。 Ind。67、637–648。 https://doi.org/10.1016/j.ecolind.2016.03.036。
Liakos、KG、Busato、P.、Moshou、D.、Pearson、S.、Bochtis、D.、2018.農業における機械学習:レビュー。 センサー18(8)、2674。
Liebisch、F.、Kirchgessner、N.、Schneider、D.、Walter、A.、Hund、A.、2015.モバイルマルチセンサーアプローチによるトウモロコシ形質の遠隔空中表現型。 Plant Methods 11(1)、9。https://doi.org/10.1186/s13007-015-0048-8。
Lin、Z.、Guo、W.、2020.無人航空機システム画像と深層学習を使用したソルガム穂の検出とカウント。 フロント。 植物科学11.
Liu、S.、Guo、L.、Webb、H.、Ya、X.、Chang、X.、2019.クラウドコンピューティングに基づく現代のエコ農業のモノのインターネット監視システム。 IEEE Access 7、37050〜37058。
Lopez-Granados、´F.、2011年。サイト固有の雑草管理のための雑草検出:マッピングとリアルタイムアプローチ。 雑草の解像度。 51(1)、1–11。 https://doi.org/10.1111/j.1365-3180.2010.00829.x。
Lopez-Granados、´F.、Torres-Sanchez、´J.、De Castro、A.-I.、Serrano-P´erez、A.、MesasCarrascosa、F.-J.、Pena、〜J.-M。 、2016年。高解像度UAV画像を使用した、イネ科作物のイネ科雑草のオブジェクトベースの早期監視。 アグロン。 保つ。 開発者36(4)、1〜12
Lopez-Granados、´F.、Torres-S´ anchez、J.、Serrano-P´erez、A.、de Castro、AI、MesasCarrascosa、F.-J.、Pena、〜J.-M.、2016年。 UAV技術を使用したヒマワリの初期の雑草マッピング:除草剤処理マップの雑草閾値に対する変動性。 精度。 アグリック。 17(2)、183–199。
Lucieer、A.、Malenovský、Z.、Veness、T.、Wallace、L.、2014年。HyperUAS–マルチローター無人航空機システムからのイメージング分光法。 J.フィールドロブ。 31(4)、
571〜590。 https://doi.org/10.1002/rob.21508。
Lumme、J.、Karjalainen、M.、Kaartinen、H.、Kukko、A.、Hyyppa、¨J。、Hyypp¨a、H.、Jaakkola、A。、&Kleemola、J.、2008.地上レーザースキャン農作物。 JJで
チェンJ.マースH–G。 (編)、写真測量、リモートセンシング、および空間情報科学の国際アーカイブ-ISPRSアーカイブ(Vol。37、pp。563–566)。
写真測量とリモートセンシングのための国際協会。 https://www.scopus .com / inward / record.uri?eid = 2-s2.0-84919356328&partnerID = 40&md5 = 574
b802131a99d16318ce619a01ca1bf.
Ma、L.、Li、M.、Ma、X.、Cheng、L.、Du、P.、Liu、Y.、2017.教師ありオブジェクトベースの土地被覆画像分類のレビュー。 ISPRSJ.フォトグラム。 リモートセンサー130、
277–293。 https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. 精密農業における無人航空機によるリモート センシングの展望。 トレンド 植物科学24 (2)、152–164。 https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang、M.、Ghulam、A.、Sidike、P.、Hartling、S.、Maimaitiyiming、M.、Peterson、K.、Shavers、E.、Fishman、J.、Peterson、J.、Kadam、S.、 Burken、J.、Fritschi、F.、2017年。
マルチセンサーデータ融合とエクストリームラーニングマシンを使用した大豆の無人航空機システム(UAS)ベースの表現型。 ISPRSJ.フォトグラム。 Remote Sens。134、43–58。 https://doi.org/10.1016/j.isprsjprs.2017.10.011。 Maimaitijiang、M.、Sagan、V.、Sidike、P.、Daloye、AM、Erkbol、H.、Fritschi、FB、2020。
衛星/UAV データの融合と機械学習を使用した作物の監視。 リモートセンシング 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth 、B.、2018年。
環境モニタリング。 リモートセンシング10(4)、641。
Marinko, RA, 1998. 1989 年の学位論文および The Serials Librarian 35 (1–2), 29–44 における女性研究ジャーナルへの引用。 https://doi.org/10.1300/J123v35n01_
03.
Masroor, R.、Naeem, M.、Ejaz, W.、2021 年。UAV 支援ワイヤレス ネットワークにおけるリソース管理: 最適化の観点。 アドホック ネットワーク。 121、102596 https://doi.org/10.1016/j.adhoc.2021.102596。
Matese, A., Di Gennaro, SF, 2018. マルチスペクトル、サーマル、RGB の高解像度画像に基づくマルチセンサー UAV プラットフォームの実用的な応用
ブドウ栽培。 Agriculture 8(7)、116。https://doi.org/10.3390/agriculture8070116。
Matese, A., Di Gennaro, SF, 2021. 精密ブドウ栽培における UAV の使用を主流化するための重要な要素として、従来の NDVI インデックスを超えて。 科学Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese、A.、Toscano、P.、Di Gennaro、SF、Genesio、L.、Vaccari、FP、Primicerio、J.、Belli、C.、Zaldei、A.、Bianconi、R.、Gioli、B.、2015 。UAV、航空機の相互比較
精密ブドウ栽培のための衛星リモートセンシングプラットフォーム。 リモートセンシング 7 (3)、2971–2990。 https://doi.org/10.3390/rs70302971。
Mazzia、V.、Comba、L.、Khaliq、A.、Chiaberge、M.、Gay、P.、2020.UAVおよび機械学習に基づく衛星駆動植生指数の精度向上
農業。 センサー20(9)、2530。https://doi.org/10.3390/s20092530。
マケイン、KW、1990年。知的空間における著者のマッピング:技術的概要。 混雑する。 Soc。 情報。 科学41(6)、433–443。
Meinen、BU、Robinson、DT、2021.農業侵食モデリング:UAV時系列データを使用したUSLEおよびWEPPフィールドスケール侵食推定の評価。 環境。 モデル。 ソフトウェア137、104962。https://doi.org/10.1016/j.envsoft.2021.104962。
Melville、B.、Lucieer、A.、Aryal、J.、2019.ハイパースペクトル無人航空機システム(UAS)画像を使用した低地の原生草地コミュニティの分類
タスマニアのミッドランド。 ドローン3(1)、5。
Messina、G.、Modica、G.、2020.精密農業におけるUAV熱画像の応用:最先端技術と将来の研究展望。 リモートセンシング12(9)、https://doi.org/10.3390/rs12091491。
Mishra, D.、Luo, Z.、Jiang, S.、Papadopoulos, T.、Dubey, R.、2017 年。ビッグデータに関する書誌学的研究: 概念、傾向、および課題。 ビジネスプロセス管理者J. 23 (3)、
555-573。
持田健一、西正大将、平山徹、2015年。圃場条件下で取得したライフサイクルデータセットを用いた作物改良。 フロント。 植物科学6 https://doi.org/10.3389/
fpls.2015.00740。
Mogili、UM.R.、Deepak、BBVL、2018年。精密農業におけるドローンシステムの適用に関するレビュー。 ProcediaComput。 科学133、502〜509。
Moharana, S., Dutta, S., 2016. ハイパースペクトル画像によるイネのクロロフィルと窒素含有量の空間的変動。 ISPRS J. フォトグラム。 リモートセンス 122, 17–29.
Muangprathub、J.、Boonnam、N.、Kajornkasirat、S.、Lekbangpong、N.、Wanichsombat、A.、
Nillaor、P.、2019年。スマートファームのIoTおよび農業データ分析。 計算します。 電子。 アグリック。 156、467–474。
Nansen、C.、Elliott、N.、2016年。昆虫学におけるリモートセンシングと反射率プロファイリング。 アンヌ。 エントモル牧師。 61(1)、139–158。 https://doi.org/10.1146/annurev-ento010715-023834。
Navia、J.、Mondragon、I.、Patino、D.、Colorado、J.、2016年。農業におけるマルチスペクトルマッピング:自律型クワッドコプターUAVを使用した地形モザイク。 Int。 会議
無人航空機システム。 (ICUAS)2016、1351〜1358。 https://doi.org/10.1109/ICUAS.2016.7502606。
Nayyar、A.、Nguyen、B.-L.、Nguyen、NG、2020.ドローンのインターネット(Iodt):スマートドローンの将来の構想。 アドバンスIntell。 システム。 計算します。 1045、563–580。 https://doi.org/10.1007/978-981-15-0029-9_45。
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. マイクロ UAV 用の軽量マルチスペクトル センサー - 非常に高解像度の空中リモート センシングの機会。 Int。 アーチ。 フォトグラム。 リモートセンシュスパット。 インフォ。 Sci 37 (B1)、1193–1200。
Negash、L.、Kim、H.-Y.、Choi、H.-L.、2019年。農業における新たなUAVアプリケーション。 で:2019年第7回ロボット知能技術に関する国際会議と
アプリケーション(RiTA)、254〜257ページ。 https://doi.org/10.1109/RITAPP.2019.8932853。
Nerur、SP、Rasheed、AA、Natarajan、V.、2008年。戦略的管理分野の知的構造:著者の共引用分析。 戦略。 マナグ。 J. 29(3)、
319-336。
Neupane、K.、Baysal-Gurel、F.、2021.無人航空機を使用した植物病害の自動識別と監視:レビュー。 リモートセンシング13(19)、3841。https://doi.org/10.3390/rs13193841。
Nex, F., Remondino, F., 2014. 3D マッピング アプリケーション用の UAV: レビュー。 アプリケーションジオマティクス 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu、H.、Hollenbeck、D.、Zhao、T.、Wang、D.、Chen、Y.、2020.精密農業における小型UAVによる蒸発散量の推定。 センサー20(22)、6427。https://
doi.org/10.3390/s20226427。
Osareh、F.、1996.計量書誌学、引用分析および共引用分析。 文献レビューI46(3)、149–158。 https://doi.org/10.1515/libr.1996.46.3.149。
P´adua、L.、Vanko、J.、Hruˇska、J.、Ad〜ao、T.、Sousa、JJ、Peres、E.、Morais、R.、2017.アグロフォレストリーにおけるUAS、センサー、およびデータ処理:実用化に向けたレビュー。 Int。 J. Remote Sens。38(8–10)、2349–2391。 https://doi.org/10.1080/01431161.2017.1297548。
Panday、US、Pratihast、AK、Aryal、J.、Kayastha、RB、2020.穀物作物のドローンベースのデータソリューションに関するレビュー。 ドローン4(3)、1–29。 https://doi.org/10.3390/
drones4030041。
Parsaeian、M.、Shahabi、M.、Hassanpour、H.、2020.画像処理と人工ニューラルネットワークを使用したゴマの油とタンパク質の含有量の推定。 混雑する。 油
化学者協会。 97(7)、691〜702。
Pena、〜JM、Torres-S´anchez、J.、de Castro、AI、Kelly、M.、Lopez-Granados、´F.、Suarez、O。、オブジェクトベースの分析を使用した初期のトウモロコシ畑での雑草マッピングの
無人航空機(UAV)の画像。 PLoS ONE 8(10)、e77151。
P´erez-Ortiz、M.、Pena、〜JM、Guti´errez、PA、Torres-S´ anchez、J.、Herv´as-Martínez、C。、
Lopez-Granados、´F.、2015年。無人航空機と作物列検出方法を使用したヒマワリ作物の雑草マッピングのための半教師ありシステム。 Appl。 ソフト計算。 J. 37、533–544。 https://doi.org/10.1016/j.asoc.2015.08.027。
Pincheira、M.、Vecchio、M.、Giaffreda、R.、Kanhere、SS、2021.精密農業におけるブロックチェーンベースの水管理システムの信頼できるデータソースとしての費用効果の高いIoTデバイス。 計算します。 電子。 アグリック。 180、105889。
Popescu、D.、Stoican、F.、Stamatescu、G.、Ichim、L.、Dragana、C.、2020.精密農業におけるインテリジェントモニタリングのための高度なUAV-WSNシステム。 センサー20(3)、https://doi.org/10.3390/s20030817。
Pournader、M.、Shi、Y.、Seuring、S.、Koh、SL、2020.サプライチェーン、輸送、ロジスティクスにおけるブロックチェーンアプリケーション:文献の系統的レビュー。 Int。 J.製品解像度58(7)、2063〜2081。
Primicerio、J.、Di Gennaro、SF、Fiorillo、E.、Genesio、L.、Lugato、E.、Matese、A.、Vaccari、FP、2012年。精密農業用の柔軟な無人航空機。
精度。 アグリック。 13(4)、517–523。 https://doi.org/10.1007/s11119-012-9257-6。
プリチャード、A.、1969年。統計書誌学または計量書誌学。 J.ドキュメント。 25(4)、348–349。
Pudelko、R.、Stuczynski、T.、Borzecka-Walker、M.、2012年。実験場と作物の評価のための無人航空機(UAV)の適合性。 農業99(4)、431–436。
Puri、V.、Nayyar、A.、Raja、L.、2017.農業用無人機:精密農業における現代のブレークスルー。 J.スタティス。 マナグ。 システム。 20(4)、507–518。
Radoglou-Grammatikis、P.、Sarigiannidis、P.、Lagkas、T.、Moscholios、I.、2020.精密農業用のUAVアプリケーションの編集。 計算します。 ネットワーク。 172、
107148https://doi.org/10.1016/j.comnet.2020.107148。
Ramesh、KV、Rakesh、V.、Prakasa Rao、EVS、2020年。農業研究におけるビッグデータ分析と人工知能の応用。 インドのJ.アグロン。 65(4)、383–395。
Raparelli、E.、Bajocco、S.、2019.農林業研究における無人航空機の使用に関する計量書誌学的分析。 Int。 J. Remote Sens。40(24)、
9070〜9083。 https://doi.org/10.1080/01431161.2019.1569793。
Rasmussen、J.、Nielsen、J.、Garcia-Ruiz、F.、Christensen、S.、Streibig、JC、Lotz、B.、2013年。
雑草研究における小型無人航空機システム (UAS) の潜在的な用途。 雑草の解像度。 53(4)、242–248。
Rasmussen、J.、Ntakos、G.、Nielsen、J.、Svensgaard、J.、Poulsen、RN、Christensen、S.は、に取り付けられた消費者向けカメラから得られた植生指数です。
UAV は、実験プロットを評価するのに十分な信頼性がありますか? ユーロ。 J.アグロン。 74、75–92。 https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb、A.、Rejeb、K.、Abdollahi、A.、Zailani、S.、Iranmanesh、M.、Ghobakhloo、M.、2022.食品サプライチェーンのデジタル化:計量書誌学のレビューとキールートのメインパス
分析。 サステナビリティ14(1)、83。https://doi.org/10.3390/su14010083。
Rejeb、A.、Rejeb、K.、Simske、SJ、Treiblmaier、H.、2021a。 サプライチェーン管理とロジスティクスのためのドローン:レビューと研究の議題。 Int。 J.ロジスト。 解像度Appl。
1〜24。 https://doi.org/10.1080/13675567.2021.1981273。
Rejeb、A.、Rejeb、K.、Simske、S.、Treiblmaier、H.、2021b。 ロジスティクスおよびサプライチェーン管理におけるブロックチェーンテクノロジー:計量書誌学的レビュー。 ロジスティクス5(4)、72。
https://doi.org/10.3390/logistics5040072.
Rejeb、A.、Rejeb、K.、Simske、S.、Treiblmaier、H.、2021c。 人道的ドローン:レビューと研究の議題。 モノのインターネット16、100434。https://doi.org/10.1016/j。
iot.2021.100434。
Rejeb, A.、Treiblmaier, H.、Rejeb, K.、Zailani, S.、2021d. ヘルスケアにおけるブロックチェーン研究: 文献レビューと現在の研究動向。 J.of Data,Inf. と
マナグ。 3(2)、109–124。
Rejeb、A.、Simske、S.、Rejeb、K.、Treiblmaier、H.、Zailani、S.、2020.サプライチェーン管理とロジスティクスにおけるモノのインターネットの研究:計量書誌学的分析。 インターネット
of Things 12、100318。
ReportLinker、2021年。YearGlobeNewswireニュースルームまでに世界の農業用無人機市場が15.2億米ドルに達する。 https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the-年-2027.html。
Ribeiro-Gomes、K.、Hernandez-L´opez、´D.、Ortega、JF、Ballesteros、R.、Poblete、T.、Moreno、MA、2017.非冷却サーマルカメラのキャリブレーションと最適化
農業におけるUAVアプリケーションの写真測量プロセス。 センサー(スイス)17(10)。 https://doi.org/10.3390/s17102173。
リベラ、マサチューセッツ州、ピザム、A.、2015年。ホスピタリティ研究の進歩:「ロドニーデンジャーフィールドからアレサフランクリンへ」。 Int。 J.コンテンポラリー。 病院。 マナグ。 27(3)、
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. 温室内の環境変数を測定するためのミニ UAV ベースの感覚システム。 センサー 15 (2)、3334–3350。 https://doi.org/10.3390/s150203334。
Rozenberg、G.、Kent、R.、Blank、L.、2021.商業用タマネギ畑における晩期の雑草の空間分布パターンの検出と分析に利用される消費者グレードのUAV。 精度。 アグリック。 22(4)、1317〜1332。 https://doi.org/10.1007/s11119-021-09786-y。
Saari、H.、Pellikka、I.、Pesonen、L.、Tuominen、S.、Heikkila、¨J。、Holmlund、C.、Makynen、¨J。、Ojala、K.、Antila、T.、2011.無人森林および農業用途向けの航空機(UAV)で動作するスペクトルカメラシステム。 続行。 SPIE –Int。 Soc。 Opt。 エンジニアリング8174https://doi.org/10.1117/12.897585。
Sah、B.、Gupta、R.、Bani-Hani、D.、2021.ドローンロジスティクスを実装するための障壁の分析。 Int。 J.ロジスト。 解像度Appl。 24(6)、531〜550。 https://doi.org/10.1080/
13675567.2020.1782862.
Saha、AK、Saha、J.、Ray、R.、Sircar、S.、Dutta、S.、Chattopadhyay、SP、およびSaha、HN、農業分野の作物品質を改善するためのIOTベースのドローン。 SHで
N. Chakrabarti S. (編)、2018 IEEE 8th Annual Computing and Communication Workshop and Conference、CCWC 2018 (Vols. 2018-January、pp. 612–615)。 研究所
of Electrical and Electronics Engineers Inc. doi:10.1109/CCWC.2018.8301662。
Sai Vineeth、KV、Vara Prasad、YR、Dubey、SR、Venkataraman、H.、2019年。LEDCOM:精密農業のための斬新で効率的なLEDベースの通信。 IEEE会議情報。 コミュン。 技術。 2019、1〜5。 https://doi.org/10.1109/CICT48419.2019.9066177。
サラミ、E。、バラド、C。、牧師、E.、2014年。植生地域のリモートセンシングに適用されたUAV飛行実験。 リモートセンシング6(11)、11051〜11081。 https://doi.org/10.3390/rs61111051。
Sankaran、S.、Khot、LR、Espinoza、CZ、Jarolmasjed、S.、Sathuvalli、VR、Vandemark、GJ、Miklas、PN、Carter、AH、Pumphrey、MO、Knowles、NRN、Pavek、MJ、2015年。
列およびフィールド作物の表現型解析のための低高度、高解像度の航空画像システム: レビュー。 ユーロ。 J.アグロン。 70、112–123。 https://doi.org/10.1016/j.
eja.2015.07.004。
Santesteban、LG、Di Gennaro、SF、Herrero-Langreo、A.、Miranda、C.、Royo、JB、Matese、A.、2017年。
ブドウ園内の植物の水分状態の瞬間的および季節的変動。 アグリック。 水管理。 183、49–59。 https://doi.org/10.1016/j.agwat.2016.08.026。
Sarli、CC、Dubinsky、EK、Holmes、KL、2010年。引用分析を超えて:研究の影響を評価するためのモデル。 J.Med。 図書館協会:JMLA 98(1)、17–23。 https://doi.org/10.3163/1536-5050.98.1.008。
Schaepman、ME、Ustin、SL、Plaza、AJ、Painter、TH、Verrelst、J.、Liang、S.、2009年。地球システム科学関連のイメージング分光法-評価。 リモートセンセーションエンバイロン。 113、S123〜S137。
Schirrmann、M.、Giebel、A.、Gleiniger、F.、Pflanz、M.、Lentschke、J.、Dammer、K.-H.、2016.低コストUAVによる冬コムギ作物の農業パラメーターのモニタリング
画像。 リモートセンシング8(9)。 https://doi.org/10.3390/rs8090706。
Schmale III、DG、Dingus、BR、Reinholtz、C.、2008年。上記の正確な航空生物学的サンプリングのための自律型無人航空機の開発と応用
農地。 J.フィールドロブ。 25(3)、133–147。 https://doi.org/10.1002/rob.20232。
Shadrin, D.、Menshchikov, A.、Somov, A.、Bornemann, G.、Hauslage, J.、Fedorov, M.、
人工知能を使用した組み込みセンシングにより、精密農業を可能にします。 IEEE トランス。 計器。 測定します。 69(7)、4103–4113。
Shakhatreh、H.、Sawalmeh、AH、Al-Fuqaha、A.、Dou、Z.、Almaita、E.、Khalil、I.、
Othman、NS、Khreishah、A.、Guizani、M.、2019.無人航空機(UAV):民間用途と主要な研究課題に関する調査。 IEEEアクセス7、
48572〜48634。 https://doi.org/10.1109/ACCESS.2019.2909530。
Shakoor、N.、Northrup、D.、Murray、S.、Mockler、TC、2019.ビッグデータ主導の農業:植物育種、ゲノミクス、およびリモートセンシングの使用におけるビッグデータ分析
作物の生産性を向上させる技術。 植物フェノームJ.2(1)、1–8。
Sharma、BK、Chandra、G.、Mishra、VP、2019年。法医学調査におけるUAVとAIの比較分析と影響。 で:議事録–2019アミティインターナショナル
人工知能に関する会議。 https://doi.org/10.1109/AICAI.2019.8701407。
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022.サプライチェーン管理における人工知能の役割: 領域のマッピング。 Int。 J。
製品解像度1–24。 https://doi.org/10.1080/00207543.2022.2029611。
Shi、Y.、Thomasson、JA、Murray、SC、Pugh、NA、Rooney、WL、Shafian、S.、Rajan、N.、Rouze、G.、Morgan、CLS、Neely、HL、Rana、A.、Bagavathiannan 、MV、
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A.、マカッチェン、BF、
Baltensperger、DD、Avant、RV、Vidrine、M.、Yang、C.、Zhang、J.、2016年。ハイスループット表現型および農学研究用の無人航空機。 PLoS ONE
11(7)、e0159781。
Shuai、G.、Martinez-Feria、RA、Zhang、J.、Li、S.、Price、R.、Basso、B.、2019.無人航空機を使用した収量安定ゾーン全体のトウモロコシ林分不均一性のキャプチャ
車両(UAV)。 センサー19(20)、4446。https://doi.org/10.3390/s19204446。
Small、H.、1973.科学文献における共引用:24つの文書間の関係の新しい尺度。 混雑する。 Soc。 情報。 科学4(265)、269–XNUMX。
Small、H.、Rorvig、ME、Lunin、LF、1999.引用マッピングによる科学の視覚化。 混雑する。 Soc。 情報。 科学50(9)、799–813。
ソアレス、VHA、ポンティ、マサチューセッツ州、ゴンサルベス、RA、カンペッロ、RJGB、2021年。広い牧草地に地理的に配置された航空写真で野生で数えている牛。 計算します。 電子。 アグリック。 189、106354https://doi.org/10.1016/j.compag.2021.106354。
Srivastava、K.、Pandey、PC、Sharma、JK、2020.UAVを使用した精密農業のアプリケーションにおけるルート最適化のアプローチ。 ドローン4(3)、58。https://doi.org/10.3390/drones4030058。
スタッフォード、JV、2000年。21世紀の精密農業の実施。 J.Agric。 エンジニアリング解像度76(3)、267–275。
Su、J.、Coombes、M.、Liu、C.、Guo、L.、Chen、W.-H.、2018.無人航空機を使用したリモートセンシング画像による小麦の干ばつ評価。 2018年に第37回中国統制会議(CCC)。
Su、J.、Liu、C.、Coombes、M.、Hu、X.、Wang、C.、Xu、X.、Li、Q.、Guo、L.、Chen、W.-H.、2018。マルチスペクトルUAV航空画像から学習することによる小麦黄さびの監視。
計算します。 電子。 アグリック。 155、157–166。 https://doi.org/10.1016/j。 compag.2018.10.017。
Su、Y.、Wang、X.、2021.ビッグデータによるスマート農業の構築過程における農業経済管理の革新。 持続可能な計算。 Inf。 システム。 31、100579https://doi.org/10.1016/j.suscom.2021.100579。
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. コットンキャノピーの水ストレスを検出するための無人熱赤外線空中システムの感度の評価。 トランス。 浅部 50 (6), 1955–1962.
Sumesh、KC、Ninsawat、S.、Som-ard、J.、2021.無人航空機を使用したサトウキビ収量推定のためのRGBベースの植生指数、作物表面モデル、およびオブジェクトベースの画像分析アプローチの統合。 計算します。 電子。 アグリック。 180、105903https://doi.org/10.1016/j.compag.2020.105903。
Suomalainen、J.、Anders、N.、Iqbal、S.、Franke、J.、Wenting、P.、Bartholomeus、H.、Becker、R.、Kooistra、L.、2013.軽量ハイパースペクトルマッピングシステム
無人航空機—最初の結果。 で:2013年第5回ハイパースペクトル画像と信号処理に関するワークショップ:リモートセンシングの進化(WHISPERS)、pp。1–4。 https://doi.org/10.1109/WHISPERS.2013.8080721。
Suomalainen、J.、Anders、N.、Iqbal、S.、Roerink、G.、Franke、J.、Wenting、P.、Hünniger、D。、Bartholomeus、H.、Becker、R.、Kooistra、L.、 2014.軽量ハイパースペクトル
無人航空機用のマッピングシステムと写真測量処理チェーン。 リモートセンシング6(11)、11013〜11030。 https://doi.org/10.3390/
rs61111013。
Syeda、IH、Alam、MM、Illahi、U.、Su'ud、MM、2021.農業における画像処理、UAV、AIを使用した高度な制御戦略:レビュー。 ワールドJ.エンジニアリング18(4)、
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai、A.、Rigsby、JT、1998.会計におけるジャーナルの影響を調査するための引用を使用した情報処理。 Inf。 プロセス。 管理。 34(2–3)、341–359。
Tang、Y.、Dananjayan、S.、Hou、C.、Guo、Q.、Luo、S.、He、Y.、2021. 5Gネットワークとその農業への影響に関する調査:課題と機会。 計算します。
電子。 アグリック。 180、105895https://doi.org/10.1016/j.compag.2020.105895。
Tantalaki、N.、Souravlas、S.、Roumeliotis、M.、2019.精密農業におけるデータ主導の意思決定:農業システムにおけるビッグデータの台頭。 J.Agric。 食品情報
20(4)、344–380。
Tao、H.、Feng、H.、Xu、L.、Miao、M.、Yang、G.、Yang、X.、Fan、L.、2020.UAVを使用した冬コムギの収量と草丈の推定-ベースのハイパースペクトル画像。
センサー20(4)、1231。
Techy, L., Schmale III, DG, Woolsey, CA, 2010. 27 台の自律型無人航空機を使用した、下層大気中の植物病原体の調整された空気生物学的サンプリング。 J. フィールド ロブ。 3(335)、343–10.1002。 https://doi.org/20335/rob.XNUMX。
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. ディープラーニングを使用した大豆害虫の検出と分類
UAV画像付き。 計算します。 電子。 アグリック。 179、105836。
Thamm、H.-P.、Menz、G.、Becker、M.、Kuria、DN、Misana、S.、Kohn、D.、2013.タンザニアのAN湿地における農業システムの評価のためのUasの使用—そして、持続可能な農業のためのWetSeasonと、Terra-SarXデータのグラウンドトゥルースの提供。 In:ISPRS –写真測量、リモートセンシング、空間情報科学の国際アーカイブ、401〜406ページ。 https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013。
Thelwall、M.、2008年。計量書誌学からウェブメトリクスへ。 J.情報科学34(4)、605–621。
Torres-Sanchez、´J.、Lopez-Granados、´F.、Pena、〜JM、2015年。UAV画像の最適なしきい値処理のための自動オブジェクトベースの方法:草本作物の植生検出への応用。 計算します。 電子。 アグリック。 114、43–52。 https://doi.org/10.1016/j.compag.2015.03.019。
Torres-Sanchez、´J.、Lopez-Granados、´F.、Serrano、N.、Arquero、O.、Pena、〜JM、Hassan、QK、2015年。無人航空機(UAV)技術。 PLoS ONE 3(10)、e6。
Torres-Sanchez、´J.、Pena、〜JM、de Castro、AI、Lopez-Granados、´F.、2014年。UAVからの画像を使用した初期の小麦畑における植生画分の多時期マッピング。 計算します。 電子。 アグリック。 103、104〜113。 https://doi.org/10.1016/j。 compag.2014.02.009。
Tsouros、DC、Bibi、S.、Sarigiannidis、PG、2019.精密農業のためのUAVベースのアプリケーションに関するレビュー。 情報(スイス)10(11)。 https://doi.org/10.3390/info10110349。
Tu、Y.-H.、Phinn、S.、Johansen、K.、Robson、A.、Wu、D.、2020.園芸樹木の作物構造を測定するためのドローン飛行計画の最適化。 ISPRSJ.フォトグラム。
Remote Sens。160、83–96。 https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis、A.、Katsoulas、N.、Bartzanas、T.、Kittas、C.、2017.農業におけるモノのインターネット、最近の進歩と将来の課題。 Biosyst。 エンジニアリング164、31〜48。
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. メキシコにおけるコンピューター サイエンス研究のサイエントメトリック マッピング。 サイエントメトリクス 105 (1)、97–114。
国連、2019年。世界人口の見通し2019年。https://population.un.org/wpp/(15年04月2022日にアクセス)。
Uto、K.、Seki、H.、Saito、G.、Kosugi、Y.、2013.UAV搭載ミニチュアハイパースペクトルセンサーシステムによる水田の特性評価。 IEEEJ.Sel。 上。 Appl。 EarthObs。
Remote Sens。6(2)、851–860。 https://doi.org/10.1109/JSTARS.2013.2250921。 van der Merwe、D.、Burchfield、DR、Witt、TD、Price、KP、Sharda、A.、2020. Drones in
農業。 アドバンスアグロン。 162、1〜30。
Velusamy、P.、Rajendran、S.、Mahendran、RK、Naseer、S.、Shafiq、M.、Choi、J.-G.、2022。
精密農業における無人航空機(UAV):アプリケーションと課題。 Energies 15(1)、217。https://doi.org/10.3390/en15010217。
Ventura、D.、Bonifazi、A.、Gravina、MF、Belluscio、A.、Ardizzone、G.、2018.無人航空機を使用した生態学的に敏感な海洋生息地のマッピングと分類
車両(UAV)画像とオブジェクトベースの画像分析(OBIA)。 リモートセンシング10(9)、1331。https://doi.org/10.3390/rs10091331。
Verger、A.、Vigneau、N.、Ch´eron、C.、Gilliot、J.-M.、Comar、A.、Baret、F.、2014.小麦および菜種作物の無人航空機システムからの緑地指数。 リモートセンセーションエンバイロン。 152、654〜664。 https://doi.org/10.1016/j.rse.2014.06.006。
Von Bueren、SK、Burkart、A.、Hueni、A.、Rascher、U.、Tuohy、MP、Yule、IJ、2015年。草地にXNUMXつの光学UAVベースのセンサーを配備する:課題と
制限。 Biogeosciences 12(1)、163–175。 https://doi.org/10.5194/bg-12-163-2015。
Vuran、MC、Salam、A.、Wong、R.、Irmak、S.、2018年。精密農業における地下物のインターネット:建築と技術の側面。 アドホックネットワーク。 81、
160–173。 https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba、SF、Queiroz、MM、2021年。デジタルヘルスの秘密の要素としての責任ある人工知能:計量書誌学的分析、洞察、および研究の方向性。
情報。 システム。 フロント。 1〜16。
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. 作物生育モニタリングにおけるリモートセンシング研究動向の文献分析: 中国の事例研究。 リモートセンシング 11 (7). https://doi.org/10.3390/rs11070809.
ホワイト、HD、ブリティッシュコロンビア州グリフィス、1981年。著者の引用:知的構造の文学的な尺度。 混雑する。 Soc。 情報。 科学32(3)、163–171。
Xiang、H.、Tian、L.、2011年。自律型無人航空機(UAV)に基づく低コストの農業リモートセンシングシステムの開発。 Biosyst。 エンジニアリング108(2)、174–190。 https://doi.org/10.1016/j.biosystemseng.2010.11.010。
Xie、C.、Yang、C.、2020.UAVベースのセンサーを使用した植物のハイスループット表現型形質に関するレビュー。 計算します。 電子。 アグリック。 178、105731https://doi.org/10.1016/j。
compag.2020.105731。
Yao、H.、Qin、R.、Chen、X.、2019年。リモートセンシングアプリケーション用の無人航空機—レビュー。 リモートセンシング11(12)。 https://doi.org/10.3390/
rs11121443。
Yeom、S.、2021.マルチローターによる赤外線熱画像による移動者の追跡と誤った追跡の除去。 ドローン5(3)、65。https://doi.org/10.3390/drones5030065。
Yue、J.、Feng、H.、Jin、X.、Yuan、H.、Li、Z.、Zhou、C.、Yang、G.、Tian、Q.、2018.画像を使用した作物パラメーター推定の比較UAVマウントから
スナップショットハイパースペクトルセンサーと高解像度デジタルカメラ。 リモートセンシング10(7)、1138。https://doi.org/10.3390/rs10071138。
Yue、J.、Yang、G.、Li、C.、Li、Z.、Wang、Y.、Feng、H.、Xu、B.、2017.無人航空機を使用した冬コムギの地上バイオマスの推定-ベースのスナップショット
ハイパースペクトルセンサーと作物の高さの改善されたモデル。 リモートセンシング9(7)。 https://doi.org/10.3390/rs9070708。
Zahawi、RA、Dandois、JP、Holl、KD、Nadwodny、D.、Reid、JL、Ellis、EC、2015年。熱帯林の回復を監視するための軽量無人航空機の使用。 Biol。
保存します。 186、287〜295。 https://doi.org/10.1016/j.biocon.2015.03.031。 Zamora-Izquierdo、MA、Santa、J.、Martínez、JA、Martínez、V.、Skarmeta、AF、2019。
エッジコンピューティングとクラウドコンピューティングに基づくスマートファーミングIoTプラットフォーム。 Biosyst。 エンジニアリング177、
4-17。
Zarco-Tejada、PJ、Diaz-Varela、R.、Angileri、V.、Loudjani、P.、2014年。無人航空機から取得した非常に高解像度の画像を使用した樹高の定量化
車両 (UAV) および自動 3D 写真再構成方法。 ユーロ。 J.アグロン。 55、89–99。 https://doi.org/10.1016/j.eja.2014.01.004。
Zhang、C.、Craine、WA、McGee、RJ、Vandemark、GJ、Davis、JB、Brown、J.、Hulbert、SH、Sankaran、S.、2020.涼しい季節の作物における開花強度の画像ベースの表現型。 センサー20(5)、1450。https://doi.org/10.3390/s20051450。
Zhang、C.、Kovacs、JM、2012年。精密農業のための小型無人航空機システムの適用:レビュー。 精度。 アグリック。 13(6)、693–712。 https://doi.org/
10.1007/s11119-012-9274-5.
Zhang、L.、Zhang、H.、Niu、Y.、Han、W.、2019.UAVマルチスペクトルリモートセンシングに基づくトウモロコシの水分ストレスのマッピング。 リモートセンシング11(6)、605。
Zhang、X.、Han、L.、Dong、Y.、Shi、Y.、Huang、W.、Han、L.、Gonz´ alez-Moreno、P.、Ma、H.、Ye、H.、Sobeih 、T.、2019。自動化された黄さびのためのディープラーニングベースのアプローチ
高解像度ハイパースペクトルUAV画像からの病気の検出。 リモートセンシング11(13)、1554。
Zhao、X.、Zhang、J.、Huang、Y.、Tian、Y.、Yuan、L.、2022.ウェーブレット分析と組み合わせたハイパースペクトルイメージングを使用した茶樹の病気と昆虫ストレスの検出と識別。 計算します。 電子。 アグリック。 193、106717https://doi.org/10.1016/j。 compag.2022.106717。
Zheng、A.、Wang、M.、Li、C.、Tang、J.、Luo、B.、2022.航空画像のセマンティックセグメンテーションのためのエントロピー誘導の敵対ドメイン適応。 IEEETrans。 G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. 地上ベースのスペクトルの時系列解析によるイネ生物季節学の検出索引データ。 畑作物解像度。 198、131–139。 https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng、J.、Yang、W.、2018年。ワイヤレスセンサーに基づく精密農業漏出播種システムの設計。 Int。 J.OnlineEng。 14(05)、184。
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. UAV-LiDAR データを使用した、倒伏したトウモロコシの草丈の変化の分析。 農業 10 (5), 146. https://
doi.org/10.3390/agriculture10050146。
Zhou、S.、Chai、X.、Yang、Z.、Wang、H.、Yang、C.、Sun、T.、2021. Maize-IAS:高スループットの植物表現型解析にディープラーニングを使用したトウモロコシ画像分析ソフトウェア。 Plant Methods 17(1)、48。https://doi.org/10.1186/s13007-021-00747-0。
Zhou、X.、Zheng、HB、Xu、XQ、He、JY、Ge、XK、Yao、X.、Cheng、T.、Zhu、Y.、Cao、WX、Tian、YC、2017.穀物収量の予測多時期植生を利用した稲
UAVベースのマルチスペクトルおよびデジタル画像からのインデックス。 ISPRSJ.フォトグラム。 Remote Sens。130、246–255。 https://doi.org/10.1016/j.isprsjprs.2017.05.003。
Zhou、Y.、Xie、Y.、Shao、L.、2016年。ワイヤレスセンサーネットワークに基づく温室監視システムのコアテクノロジーのシミュレーション。 Int。 J.OnlineEng。 12(05)、
43.
Zhou、Z.、Majeed、Y.、Diverres Naranjo、G.、Gambacorta、EMT、2021.精密農業における赤外線熱画像による作物の水分ストレスの評価:レビュー
ディープラーニングアプリケーションの将来の展望。 計算します。 電子。 アグリック。 182、106019https://doi.org/10.1016/j.compag.2021.106019。

{kind=link}