






























ロシアの科学者らは、車輪付きのプラットフォーム上で自動で庭を動き回り、木にぶら下がっている果物を見つけ、その中から病気や損傷のある果物を特定する自律型ドローンを開発した。彼はbotANNICという名前を受け取りました。収集されたデータに基づいて、農作物の病気の衛生マップが作成されます。稼働中の果物農場でのテストでは、監視精度が 80% を超えることが示されています。著者らが考えているように、この開発を利用すれば生産性が向上し、病気や害虫による果実の損失が最小限に抑えられるはずだ。農学者らによると、この装置は人間の補助としてのみ使用でき、代替品としては使用できないという。車両用の軌道がないため、本発明を温室で動作させるのは困難である。
XNUMXクラス
NUST MISIS の専門家は、タンボフ国立工科大学 (TSTU)、中国鉱業大学、高等経済学院の同僚と協力して、botANNIC と呼ばれる車輪付きロボット プラットフォームを開発しました。果樹園の果実の状態を自律的に監視し、病気や損傷した果実を特定し、得られたデータに基づいて園芸病害マップを作成します。テストで示されたように、デバイスの精度は 80% を超えています。
「ニューラルネットワークを使用して人間の視覚を再現するステレオカメラの助けを借りて、botANNICは木の落葉部分と実のなる部分をスキャンし、樹冠のリンゴを検出して、その熟し具合と傷みの程度を明らかにします」と同部門の責任者であるイワン・ウシャコフ氏は述べた。 NUST MISIS の物理学博士がイズベスチヤに語った。
空から撮影: オートロボットは企業の環境制御を実現します
小型車が環境検査官に取って代わる仕組み
botANNIC は、エリアの 1.5 次元地図を使用して庭内で独自に方向を設定しますが、必要に応じて、オペレーターが軌道とルートの終点を設定できます。プラットフォームの寸法 – 1.5×200 m、耐荷重 – 500 kg、電動モーター出力 – XNUMX W。この設計にはリチウムイオン電池が使用されています。ドローンにはステレオカメラとハイパースペクトルセンサーが搭載されており、果物の外観を注意深く分析し、観察結果に基づいて品質を評価することができます。ドローンは庭園内を移動する過程で情報を収集し、その情報がプラットフォームの搭載コンピューターとオペレーターのタブレットにアップロードされます。
車輪付きプラットフォームの耐荷重が大きいため、その上に追加の機器を設置することができます。たとえば、果物のサンプリングや収穫のためのマニピュレーターなどです。
このシステムは、連邦科学センターの工業用リンゴ園の領土でのテスト中に、その性能が実証されることに成功しました。 IVミチュリン、タンボフ地方に位置。研究結果は権威ある科学誌「Drones」に掲載された。
- 変動する太陽光の中で葉を背景にしたリンゴを検出するために、前景領域を自動的に選択するアルゴリズムが開発されました。次に、システムは多変量解析を使用して果物の画像をさらに次のグループに分類します: 健康なリンゴ (クラス 0)、腐ったリンゴ (クラス 1)、斑点のあるリンゴ (クラス 2)、昆虫による損傷 (クラス 3)、または真菌のかさぶた (クラス 4)。分類精度は少なくとも 80% です」と TSTU のメカトロニクスおよび技術測定部門の教授、Alexander Divin 氏は述べています。
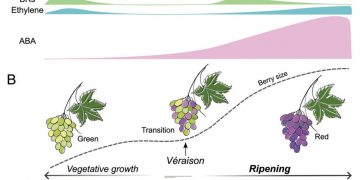
このシステムは、樹木が圧縮されたパターンで植えられている、いわゆる集中的な庭園で機能するように設計されています。科学者たちは、botANNIC に追加のセンサーとレーザーエミッターを装備し、有害な昆虫や雑草を破壊できるようにする予定です。テクノロジーの適用は、農場の生産性の向上と、さまざまな理由で発生する果実の損失の減少につながるはずです。
リンゴの収穫写真: RIA Novosti / Vitaly Timkiv
農学者を助ける
プロドヴォエ社の主任技術者パベル・チュリン氏はイズベスチヤに対し、現時点では果物農園の果物の品質管理は手作業で行われていると語った。このために、ホテルの予報官または昆虫学者というポジションがあります。彼は常に庭を点検しています。彼の義務は木や果物の状態を世話することです。ただし、予防的に機能し、病気や害虫の発生を防ぐ必要があります。たとえば、コドリングガ用の特別なトラップが庭に設置されており、そこで昆虫が見つかった場合は、木が殺虫剤で処理されます。また、気象台の指示に従い、環境の状態を監視しています。

{kind=link}